
Mise ŕ jour : 18 juin 2011
Le fichier de configuration des avions (aircraft.cfg) représente le plus haut niveau d'organisation au sein d'un conteneur pour aéronef. Chaque appareil a son propre fichier de configuration situé dans son conteneur (dossier avion). Par exemple, le aircraft.cfg du Cessna 182S peut ętre trouvé dans SimObjects \ Aircraft \ C182 \ aircraft.cfg.
Le fichier aircraft.cfg spécifie les versions de l'avion incluses dans le conteneur d'un avion, ainsi que les attributs (nom, couleur, son, tableau de bord (panels), instruments (gauges), etc.) de chaque avion et oů trouver les fichiers qui définissent ces attributs. Dans le fichier aircraft.cfg, il ya un certain nombre de sections. Le nom des sections ci-dessous est entre crochets. Pour que Flight Simulator puisse faire bon usage d'une variable, il est important que la variable se trouve dans la bonne section. Bien que l'orthographe exacte soit importante, aucun des termes utilisés n'est sensible ŕ la casse.
Pour voir les effets d'une modification, l'avion doit ętre rechargé. Les avions sont chargés dans la mémoire cache du disque, vous devez donc vider le cache pour permettre ŕ vos modifications soient reflétées dans l'exécution. Cela implique quelques étapes :
| Message d'erreur | Description |
| Aircraft initialization failure. | Indique que certains fichiers essentiels sont manquants dans le conteneur de l'avion. Si des fichiers sont manquants, l'avion ne sera généralement pas affiché dans la boîte de dialogue de sélection des avions ; par conséquent, cette erreur est rare. |
| Failed to start up the flight model. | Le fichier .air n'a pas été chargé correctement. |
| This is not a Flight Simulator aircraft model. | Le fichier du modčle visuel (.mdl) de cet avion n'est pas compatible avec Flight Simulator. |
| Visual model could not be displayed. | Une erreur est apparue lors du chargement du fichier du modčle visuel (.mdl). |
Chaque section [fltsim.n] d'un fichier de configuration d'avion concerne une variante différente (configuration) de l'avion de base, et est désigné comme un ensemble de configuration. Les ensembles de configuration permettent représenter plusieurs avions dans un unique conteneur d'avion, ce qui permet ŕ toutes les variantes de partager des composants.
S'il y a un seul article (marqué [fltsim.0]), c'est parce qu'il n'y a qu'un seul ensemble de configuration (une seule variante) dans ce conteneur. S'il y a plus d'un ensemble de configuration (marqués [fltsim.0], [Fltsim.1], [fltsim.2], etc.), chacun se réfčre ŕ une variante différente de l'avion.
Par exemple, il existe plusieurs variantes du Cessna 182, tous logés dans le męme dossier conteneur d'avion C182. Les différentes variantes doivent varier par leur titre, et peuvent également varier par d'autres éléments tels que le panel (tableau de bord), la description et les sons.
Bien que ces ensembles de configuration partagent de nombreux composants, chacun peut utiliser des panels différents. Ainsi, la ligne panel = dans les sections respectives de [fltsim] se référe au dossier de panel de chaque avion. Par exemple, panel = ifr signifie que cette version du C182 utilise les fichiers de panel dans le sous-dossier panel.ifr.
Lors de la création et du référencement des répertoires de plusieurs modčles, panels, sons, et texture, utilisez la convention de nommage foldername.extension, oů l'extension est un identifiant unique pour l'ensemble de configuration (par exemple, .IFR). Pour consulter le dossier ŕ partir du paramčtre pertinent dans le fichier aircraft.cfg, il suffit de spécifier l'extension (par exemple, panel = IFR). Si un paramčtre n'est pas explicitement indiqué, c'est qu'il se réfčre automatiquement au dossier par défaut (sans l'extension).
Les paramčtres de chaque ensemble de configuration peuvent se référer aux męmes fichiers, ŕ des fichiers différents, ou ŕ un mélange de fichiers. Bien qu'utilisant des panels différents, toutes les configurations du Cessna utilisent les męmes sons, et donc les paramčtres du son dans toutes les sections fltsim pointent vers l'unique dossier de sons du dossier C182.
Chaque avion défini par un ensemble de configuration apparaît sur une liste séparée de la boîte de dialogue Sélectionner un avion. Le fait que plusieurs avions partagent certains composants est caché ŕ l'utilisateur. Vu par l'utilisateur, ce sont des avions distincts (un peu comme si tous les fichiers communs avaient été reproduits et inclus dans trois conteneurs d'avions distincts). Vu par le développeur, les avions ne sont que des ensembles de configuration différents du męme avion. Parce qu'ils partagent des fichiers, ils font un usage beaucoup plus efficace de l'espace disque.
Au sein de chaque section [fltsim.n], on trouve des paramčtres qui définissent les détails de cet ensemble de configuration particulier :
| Propriété | Description | Exemples |
| title | Le titre (nom) de l'avion. |
Airbus A321( title=Airbus A321 ) Aircreation582SL( title= Aircreation582SL ) Boeing 737-800( title=Boeing 737-800 ) Boeing 747-400( title=Boeing 747-400 ) |
| sim | Spécifie le fichier .air (modčle de vol) (dans le dossier de l'avion) ŕ utiliser. |
Airbus A321( sim=Airbus_A321 ) Aircreation582SL( sim=trike ) Boeing 737-800( sim=Boeing737-800 ) Boeing 747-400( sim=Boeing747-400 ) |
| model | Spécifie quel dossier modčle utiliser. Si non mentionné, le dossier par défaut est utilisé. | Airbus A321( model= ) |
| panel | Spécifie quel dossier panel utiliser. |
Airbus A321( panel= ) Beech Baron 58( panel=g1000 ) Cessna Skyhawk 172SP( panel=G1000 ) |
| sound | Spécifie quel dossier son utiliser. | Airbus A321( sound= ) |
| texture | Spécifie quel dossier texture utiliser. |
Airbus A321( texture= ) Aircreation582SL( texture=1 ) Boeing 737-800( texture=2 ) Boeing 747-400( texture=3 ) |
| kb_checklists | Spécifie quel fichier _check.txt (situé dans le dossier de l'avion) utiliser sur l'onglet Checklists de la tablette. |
Boeing 737-800( kb_checklists=Boeing737-800_check ) Boeing 747-400( kb_checklists=Boeing747-400_check ) Beech Baron 58( kb_checklists=Beech_Baron_58_check ) |
| kb_reference | Spécifie quel fichier _ref.txt (situé dans le dossier de l'avion) utiliser sur l'onglet Reference de la tablette. |
Boeing 737-800( kb_reference=Boeing737-800_ref ) Boeing 747-400( kb_reference=Boeing747-400_ref ) Beech Baron 58( kb_reference=Beech_Baron_58_ref ) |
| atc_id | Le numéro de queue affiché ŕ l'extérieur de l'avion. Ce paramčtre peut aussi ętre modifié ŕ partir de la fenętre de sélection de l'appareil (si le paramčtre atc_id_enable est mis ŕ 1). N'est pas applicable aux appareils importés de Flight Simulator 98 ou de Combat Flight Simulator. (Note : les numéros de queue dessinés dans les textures ne sont pas modifiés par cette instruction). |
Boeing 737-800( atc_id=N737Z ) Boeing 747-400( atc_id=N747 ) Beech Baron 58( atc_id=N058BE ) |
| atc_airline | Le systčme ATC utilisera le nom de compagnie aérienne désigné pour cet avion. L'ATC considčrera cet avion comme un avion de ligne lorsque ce nom est utilisé en conjonction avec atc_flight_number. |
Boeing 737-800( atc_airline=American Pacific ) Boeing 747-400( atc_airline=Global Freightways ) Cessna Grand Caravan( atc_airline=Landmark ) |
| atc_flight_number | Le systčme ATC utilisera ce nombre comme une partie du callsign des avions. L'ATC considčrera cet avion comme un avion de ligne lorsque ce nom est utilisé en conjonction avec atc_airline. | Boeing 737-800( atc_flight_number=1123 ) |
| ui_manufacturer | Identifie la sous-catégorie du fabricant pour regrouper les avions dans la fenętre de sélection des appareils. |
Airbus A321( ui_manufacturer="Airbus" ) Aircreation582SL( ui_manufacturer="AirCreation" ) Boeing 737-800( ui_manufacturer="Boeing" ) Beech Baron 58( ui_manufacturer="Beechcraft" ) |
| ui_type | Identifie la sous-catégorie du type pour regrouper les avions dans la fenętre de sélection des appareils. |
Airbus A321( ui_type="A321" ) Aircreation582SL( ui_type= "582 SL Trike" ) Boeing 737-800( ui_type="737-800" ) Boeing 747-400( ui_type="747-400" ) |
| ui_variation | Identifie la variante de sous-catégorie pour grouper les appareils dans la fenętre de sélection des appareils. |
Aircreation582SL( ui_variation="Green Wing" ) Boeing 737-800( ui_variation="American Pacific Airways" ) Boeing 747-400( ui_variation="Global Freightways" ) |
| ui_typerole | Identifie le rôle de l'avion. |
Airbus A321( ui_typerole="Commercial Airliner" ) Aircreation582SL( ui_typerole="Single Engine Prop" ) Beech Baron 58( ui_typerole="Twin Engine Prop" ) Beech King Air 350( ui_typerole="Twin Engine TurboProp" ) |
| ui_createdby | Identifie le créateur du fichier de configuration. | Airbus A321( ui_createdby="Microsoft Corporation" ) |
| description | La description de l'objet peut ętre modifiée pour dire tout ce que vous voulez au sujet de cet objet. Cette information sera affichée dans le cadre de description de Flight Simulator quand l'avion est choisi. (Le <\s> est utilisé pour produire un point-virgule ( ; ) dans la description.). |
Boeing 737-800( description="One should hardly be surprised that
the world's most prolific manufacturer of commercial aircraft is also
the producer of the world's most popular jetliner. The 737 became the
best-selling commercial jetliner worldwide when orders for it hit
1,831 in June 1987 (surpassing Boeing's own 727 as the previous
champ). However, it wasn't always that way\s in the first few years
of production, there were so few orders that Boeing considered
canceling the program. They didn't, and the airplane has more than
proven itself in over three decades of service." ) Boeing 747-400( description="More than 30 years ago, the 747 made its first trip from New York to London. Since then, it's become the standard by which other large passenger jets are judged. Its size, range, speed and capacity were then, and are now, the best in its class." ) |
| visual_damage | La mise ŕ 1 de ce paramčtre autorise la visualisation des dommages (par exemples la rupture de pičces) quand l'avion s'écrase dans le paysage. Note : les dommages visuels apparaissent seulement s'ils ont été prévus dans le fichier .mdl de l'avion. | Aircreation582SL( visual_damage=1 ) |
| atc_heavy | La mise ŕ 1 de ce paramčtre entraîne que le systčme ATC ajoute le suffixe "heavy" aux callsigns des avions. |
Aircreation582SL( atc_heavy=0 ) Boeing 747-400( atc_heavy=1 ) |
| atc_parking_types | Spécifie le parking préféré pour cet avion, utilisé par l'ATC. Si la ligne est absente, l'ATC choisira le parking selon le type d'avion et les parkings disponibles. Si plusieurs valeurs sont listées, la préférence sera donnée dans l'ordre de la liste. Les valeurs valides sont : RAMP, CARGO, GATE, DOCK, MIL_CARGO, MIL_COMBAT (une ou plusieurs). |
Aircreation582SL( atc_parking_types=RAMP ) Boeing 747-400( atc_parking_types=CARGO ) de Havilland Dash 8-100( atc_parking_types=GATE,RAMP ) |
| atc_id_color | Spécifie, codé en hexadécimal RVB, la couleur du numéro de queue. Le codage est fait ainsi : <0x> indique un nombre en hexadécimal, <R> indique la valeur de la composante Rouge, <V> la valeur de la composante Verte, <B> la valeur de la composante Bleue. Les caractčres finaux ne sont pas utilisés. Chaque valeur peut aller de 0 ŕ 255. (Note : les numéros de queue dessinés dans les textures ne sont pas modifiés par cette instruction). |
Cessna Skyhawk 172SP( atc_id_color=0xffffffff ) Cessna Grand Caravan( atc_id_color=0xff000000 ) Extra 300S( atc_id_color=0xffff0000 ) |
| prop_anim_ratio | Le rapport entre nombre de tours du rotor affiché par rapport au nombre de tours réel. | Bell 206B JetRanger( prop_anim_ratio=-1.76 ) |
| atc_model | Le modčle d'avion que l'ATC reconnaît pour ce type d'avion. | Bell 206B JetRanger( atc_model= ) |
En plus des sections [fltsim], la section générale contient des informations relatives ŕ toutes les variantes de l'avion. Par exemple, les Cessna 182RG IFR, 182S, 182S sont tous le męme type d'avion, et contiennent le męme modčle de vol. Ainsi, certaines choses ne sont pas variables d'une variante ŕ une autre.
| Propriété | Description | Exemples |
| atc_type | Le type d'avion spécifique que l'ATC reconnaît pour ce type d'avion. |
Aircreation582SL( atc_type=Ultralight ) Boeing 737-800( atc_type=BOEING ) Beech Baron 58( atc_type=BARON ) |
| atc_model | Le modčle type d'avion spécifique que l'ATC reconnaît pour ce type d'avion. |
Aircreation582SL( atc_model=Trike ) Boeing 737-800( atc_model=B738 ) Boeing 747-400( atc_model=B744 ) |
| editable | Non utilisé. | |
| performance | Description de la performance de l'appareil. Modifiable. Le <\t> est le caractčre Tabulation, et le <\n> est le Retour Chariot. Comme le modčle de vol de toutes les variantes est identique, la performance de chaque variante doit aussi ętre la męme. |
Aircreation582SL( performance="Wing span: 10.6 m\nLength: 2.57
m\nWeight: 1.96 m\nHeight: 2.57 m\nEngine: 582 Rotax 1 x CDI 53
hp\nPropeller: 2 wood blades\nFuel tank composite 52 liters ( 8 US
Gal)\nDesigner: MJPP Design\nDate: 15\/11\/02\n\n" ) Boeing 737-800( performance="Cruise Speed \n477 kts 550 mph 885 km\/h\n\nEngines \nCFM56-3C1\n\nMaximum Range \n2,059 nm 2,370 mi 3,810 km\n\nService Ceiling \n36, 089 ft 11,000 m\n\nFuel Capacity \n5,311 U.S. gal 20,104 L\n\nEmpty Weight-Standard \n76,180 lb 34,550 kg\n\nMaximum Gross Weight\n150,000 lb 68,039 kg\n\nLength \n120 ft 36.45 m\n\nWingspan \n94 ft, 9 in 25.9 m\n\nHeight \n36.5 ft 11.13 m\n\nSeating \nSeats 147 to 168\n\nCargo Capacity \n1,373 ft3 38.93 m3\n\n" ) Boeing 747-400( performance="Cruise Speed\n0.85 Mach 565 mph 910 km\/h\n\nEngine options\nPratt & Whitney PW4062\nRolls-Royce RB211-524H\nGeneral Electric CF6-80C2B5F\n\nMaximum Range\n7,325 nm 13,570 km\n\nMaximum Certified Operating Altitude 45,100 ft 13,747 m\n\nFuel Capacity\n57,285 gal 216,840 L\n\nBasic Empty Weight\n394,088 lb 178,755 kg\n\nMax Gross Weight 875,000 lb 396,893 kg\n\nLength\n231 ft, 10 in 70.6 m\n\nWingspan\n211 ft, 5 in 64.4 m\n\nHeight\n63 ft, 8 in 19.4 m\n\nSeating Typical 3-class configuration - 416\nTypical 2-class configuration - 524" ) |
| category | airplane pour un avion, ou helicopter pour un hélicoptčre. |
Airbus A321( Category = airplane ) Maule M7 260C( category = Airplane ) Bell 206B JetRanger( Category = Helicopter ) |
Le paramčtre vertical_speed_time_constant (constante de temps) peut ętre utilisé pour ajuster le retard de l'indicateur de vitesse verticale de l'avion.
| Propriété | Description | Exemples |
| vertical_speed_time_constant | Augmente ou diminue le retard de l'indicateur de vitesse verticale (VSI) de l'avion. L'augmenter entraîne une réaction plus rapide du VSI. |
Airbus A321( vertical_speed_time_constant = 1 ) Beech Baron 58( vertical_speed_time_constant = 1.0 ) DG808S( vertical_speed_time_constant = 4 ) |
| pitot_heat | Echelle d'efficacité du chauffage du tube de Pitot, ou 0 si non disponible. |
Airbus A321( pitot_heat = 1.0 ) Aircreation582SL( pitot_heat=0.000000 ) DG808S( pitot_heat = 0.0 ) |
Le poids et le centre de gravité de l'aéronef peuvent ętre affectés par les paramčtres indiqués ci-dessous. La convention de signe pour les paramčtres est : positif vers l'avant en longitudinal, vers la droite latéralement, et vers le haut verticalement.
Dans les avions fournis, les paramčtres station_load.0, 1, etc. sont entre guillemets ("). Ils sont utilisés par les outils de traduction interne du langage, et ne sont pas ŕ utiliser.
Le moment d'inertie (MOI) définit la distribution des masses autour d'un axe d'un avion. Le moment d'inertie pour un axe particulier augmente avec la masse et avec la distance de cette masse par rapport ŕ l'axe. C'est ce qui détermine largement les caractéristiques inertielles de l'avion.
Les masses et équilibrages qui suivent définissent le MOI de l'avion vide, c'est ŕ dire sans carburant, passager, ou bagage. Flight Simulator détermine les MOI totaux avec ses influences sur la simulation. Les unités sont les kilogrammes par pied carré. L'absence d'un paramčtre entraîne que Flight Simulator prend la valeur par défaut fixée dans le fichier .air, s'il en existe un. Ces valeurs peuvent ętre estimées par la formule suivante :
MOI = poids ŕ vide * (D^2 . K), avec D et K valant :
| Tangage (Pitch) | Roulis (Roll) | Lacet (Yaw) | |
| D= | Longueur (feet) | Envergure (feet) | 0.5*(Longueur+Envergure) |
| K= | 810 | 1870 | 770 |
| Cette formule donne seulement des résultats approchés. Les valeurs vraies varient selon les matériaux de l'avion, l'équippement installé, le nombre de moteurs et leur position. | |||
| Propriété | Description | Exemples |
| max_gross_weight | Poids total maximum de l'avion ŕ la conception (en livres). |
Airbus A321( max_gross_weight = 150000 ) Aircreation582SL( max_gross_weight= 600.000 ) Boeing 747-400( max_gross_weight = 875000 ) Beech Baron 58( max_gross_weight = 5524 ) |
| empty_weight | Poids total (en livres) de l'avion, moins le carburant utilisable, les passagers et le fret. Si non spécifié, la valeur fixée dans le fichier .air est utilisée. |
Airbus A321( empty_weight = 74170 ) Aircreation582SL( empty_weight= 310.000 ) Boeing 747-400( empty_weight = 394088 ) Beech Baron 58( empty_weight = 3911 ) |
| reference_datum_position | Décalage (en pieds) entre le point de référence de l'avion et le point central standard de FS, lequel est au milieu de la corde du bord d'attaque. En définissant cette position de référence (reference_datum_position), les données réelles de chargement de l'avion peuvent ętre utilisées directement comme spécifié par le constructeur de l'avion. Si non spécifié, la valeur par défaut est 0,0,0. |
Aircreation582SL( reference_datum_position= 0.000, 0.000,0.000
) Boeing 747-400( reference_datum_position = 83.5, 0, 0 ) Beech Baron 58( reference_datum_position = 6.96, 0, 0 ) |
| empty_weight_cg_position | Décalage (en pieds) entre le centre de gravité le l'avion de base vide (sans carburant, passager ni bagages) et le point défini par reference_datum_position. |
Aircreation582SL( empty_weight_CG_position=0.000, 0.000,0.000
) Boeing 747-400( empty_weight_CG_position = -90.5, 0, 0 ) Beech Baron 58( empty_weight_CG_position = -6.06, 0, 0 ) |
| max_number_of_stations | Indique le nombre maximum de stations que Flight Simulator calcule quand l'appareil est chargé. Cela permet de spécifier un nombre illimité de stations. Notez qu'un trop grand nombre de stations ici entraîne un temps de chargement de l'avion plus long quand celui-ci est sélectionné, mais ceci est sans effet sur les performances en temps réel. |
Airbus A321( max_number_of_stations = 50 ) Aircreation582SL( max_number_of_stations=50 ) Douglas DC-3( max_number_of_stations =50 ) |
|
station_load.0 to station_load.n |
Indique le poids et la position des passagers ou de la charge utile ŕ une station spécifiée par un numéro unique, station_load.N. Le premier nombre dans les paramčtres sur chaque ligne indique le poids (en livres), suivi par le décalage (en pieds) de la station (longitudinale et transversale, et verticale) ŕ partir de la position de référence définie par reference_datum_position. L'ajout de stations entraîne des changements dans la dynamique de vol des avions en raison du changement du poids total et des moments d'inertie. |
Airbus A321( station_load.0 = 170.0, 41.0,-1.5, 0.0 ) Aircreation582SL( station_load.0=0.000000,0.000000,0.000000,0.000000 ) Boeing 747-400( station_load.0 = 170.0, -19.0, -2.0, 8.0 ) Beech Baron 58( station_load.0 = 170, -6.54, -1.20, 0.0 ) Airbus A321( station_load.8 = 4000.0, -27.5, 0.0, 0.0 ) Boeing 747-400( station_load.8 = 23800.0, -160.0, 0.0, 0.0 ) Cessna Grand Caravan( station_load.8 = 0, -23.2, -1.5, 0.0 ) Douglas DC-3( station_load.8 = 340.0, -33.7, 0.0, 0.0 ) |
|
station_name.0 to station_name.n |
Ce champ est le nom de la chaîne qui est utilisée dans la boîte de dialogue de charge utile (15 caractčres maximum). Son omission se traduira par l'utilisation d'un nom de station générique. |
McDonnell-Douglas/Boeing MD-83( station_name.0 = "Payload"
) Cessna Skyhawk 172SP( station_name.1 = "Front Passenger" ) Airbus A321( station_name.0 = "Pilot" ) Airbus A321( station_name.1 = "Co-Pilot" ) Airbus A321( station_name.2 = "Crew" ) Airbus A321( station_name.3 = "First Class" ) Airbus A321( station_name.4 = "Coach 3-10" ) Airbus A321( station_name.5 = "Coach 11-18" ) Airbus A321( station_name.6 = "Coach 19-25" ) Airbus A321( station_name.7 = "Forward Baggage" ) Airbus A321( station_name.8 = "Aft Baggage" ) |
| empty_weight_pitch_moi | Le moment d'inertie (MOI) relatif ŕ l'axe latéral. |
Airbus A321( empty_weight_pitch_MOI = 3172439 ) Aircreation582SL( empty_weight_pitch_MOI= 230.000 ) Boeing 747-400( empty_weight_pitch_MOI = 24223159 ) Beech Baron 58( empty_weight_pitch_MOI = 3905.65 ) |
| empty_weight_roll_moi | Le moment d'inertie (MOI) relatif ŕ l'axe longitudinal. |
Airbus A321( empty_weight_roll_MOI = 2262183 ) Aircreation582SL( empty_weight_roll_MOI= 205.000 ) Boeing 747-400( empty_weight_roll_MOI = 13352310 ) Beech Baron 58( empty_weight_roll_MOI = 2718.64 ) |
| empty_weight_yaw_moi | Le moment d'inertie (MOI) relatif ŕ l'axe vertical. |
Airbus A321( empty_weight_yaw_MOI = 3337024 ) Aircreation582SL( empty_weight_yaw_MOI= 290.000 ) Boeing 747-400( empty_weight_yaw_MOI = 39531785 ) Beech Baron 58( empty_weight_yaw_MOI = 5291.04 ) |
| empty_weight_coupled_moi | Le moment d'inertie (MOI) relatif aux axes de roulis et de lacet (usuellement zéro). |
Airbus A321( empty_weight_coupled_MOI = 0 ) Aircreation582SL( empty_weight_coupled_MOI= 0.000 ) Beech Baron 58( empty_weight_coupled_MOI= 0.0 ) Bombardier CRJ 700( empty_weight_coupled_MOI = 0.0 ) |
Les paramčtres de l'efficacité du gouvernail de profondeur et des ailerons sont des multiplicateurs de la performance par défaut des surfaces de contrôle. Par exemple, une valeur de 1,1 augmente l'efficacité de 10 pour cent. De męme, une valeur de 0,9 diminue l'efficacité de 10 pour cent. Un nombre négatif inverse l'effet normal du contrôle. L'omission d'un paramčtre entraîne la valeur par défaut de 1,0.
Les paramčtres de tangage, le roulis et de lacet sont des multiplicateurs sur la stabilité par défaut (effet d'amortissement) autour de l'axe correspondant de l'avion. Par exemple, une valeur de 1,1 augmente la d'amortissement de 10%. De męme, une valeur de 0,9 réduit l'amortissement de 10%. Un nombre négatif dans une caractéristique rend l'avion instable sur son axe. Un effet positif d'amortissement est tout simplement un effort dans la direction opposée ŕ la vitesse de rotation. L'omission d'un paramčtre se traduira par la valeur par défaut de 1,0.
Le paramčtre cruise_lift_scalar est un multiplicateur sur le coefficient de portance pour un angle d'attaque ŕ zéro. Dans ce contexte, ce paramčtre s'applique au gouvernail de profondeur avec des angles d'attaque relativement faibles, ce qui est typique d'un avion en vol de croisičre. Ce paramčtre est diminué linéairement au fur et ŕ mesure que l'angle d'attaque se déplace vers l'angle critique (décrochage), ce qui empęche la déstabilisation ŕ faible vitesse et ŕ des angles d'attaque élevés. Modifier cette valeur pour définir l'angle d'attaque (et donc de hauteur) pour un vol de croisičre. Une valeur négative n'est pas conseillée, car elle donnerait des caractéristiques de vol extręmement non naturelles. L'omission de ce paramčtre se traduit par la valeur par défaut de 1,0.
Les paramčtres hi_alpha_on_roll et hi_alpha_on_yaw sont des multiplicateurs sur les effets de roulis et de lacet pour les forts angles d'attaque. Les valeurs par défaut sont de 1,0.
Les paramčtres p_factor_on_yaw, torque_on_roll, gyro_precession_on_roll et gyro_precession_on_yaw sont des multiplicateurs sur les effets induits par les hélices. Ils sont souvent appelés "tendance au virage ŕ gauche" pour les hélices tournant dans le sens horaire, bien que Flight Simulator gčre automatiquement les hélices qui tournent dans le sens antihoraire. La valeur par défaut les valeurs sont de 1,0.
La traînée est la force aérodynamique qui détermine la vitesse et l'accélération de l'avion. Il existe deux types de base de traînée que l'utilisateur peut régler ici.
Les paramčtres parasite_drag_scalar et induced_drag_scalar sont des multiplicateurs pour les deux coefficients de traînée respectifs. Par exemple, une valeur de 1,1 augmente la traînée de 10 pour cent. Une valeur de 0,9 diminue la traînée de 10 pour cent. Les valeurs négatives ne sont pas conseillées, car elles donneraient des caractéristiques de vol extręmement non naturelles. L'omission de ces paramčtres se traduit par les valeurs par défaut de 1,0.
| Propriété | Description | Exemples |
| cruise_lift_scalar | CL0. |
Airbus A321( cruise_lift_scalar = 1.0 ) Aircreation582SL( cruise_lift_scalar=1.000 ) |
| parasite_drag_scalar | Cd0. |
Airbus A321( parasite_drag_scalar = 1.0 ) Aircreation582SL( parasite_drag_scalar=1.000 ) |
| induced_drag_scalar | Cdi. |
Airbus A321( induced_drag_scalar = 1.0 ) Aircreation582SL( induced_drag_scalar=1.000 ) |
| elevator_effectiveness | Cmde. |
Airbus A321( elevator_effectiveness = 1.0 ) Aircreation582SL( elevator_effectiveness=1.000 ) |
| aileron_effectiveness | Clda. |
Airbus A321( aileron_effectiveness = 1.0 ) Aircreation582SL( aileron_effectiveness=1.000 ) |
| rudder_effectiveness | Cndr. |
Airbus A321( rudder_effectiveness = 1.0 ) Aircreation582SL( rudder_effectiveness=0.501 ) |
| pitch_stability | Cmq. |
Airbus A321( pitch_stability = 1.0 ) Aircreation582SL( pitch_stability=1.000 ) |
| roll_stability | Clp. |
Airbus A321( roll_stability = 1.0 ) Aircreation582SL( roll_stability=1.000 ) |
| yaw_stability | Cnr. |
Airbus A321( yaw_stability = 1.0 ) Aircreation582SL( yaw_stability=1.000 ) |
| elevator_trim_effectiveness | Cmdetr. |
Airbus A321( elevator_trim_effectiveness = 1.0 ) Aircreation582SL( elevator_trim_effectiveness=1.000 ) |
| aileron_trim_effectiveness | Cldatr. |
Airbus A321( aileron_trim_effectiveness = 1.0 ) Aircreation582SL( aileron_trim_effectiveness=1.000 ) |
| rudder_trim_effectiveness | Cndrtr. |
Airbus A321( rudder_trim_effectiveness = 1.0 ) Aircreation582SL( rudder_trim_effectiveness=1.000 ) |
| hi_alpha_on_roll | Voir les notes ci-dessus. | |
| hi_alpha_on_yaw | ||
| p_factor_on_yaw | Voir les notes ci-dessus |
Douglas DC-3( p_factor_on_yaw = 0.5 ) Piper Cub( p_factor_on_yaw = 0.3 ) |
| torque_on_roll |
Douglas DC-3( torque_on_roll = 1.0 ) Extra 300S( torque_on_roll = 0.5 ) Piper Cub( torque_on_roll = 0.3 ) |
|
| gyro_precession_on_yaw | Voir les notes ci-dessus |
Douglas DC-3( gyro_precession_on_yaw = 1.0 ) Piper Cub( gyro_precession_on_yaw = 0.3 ) |
| gyro_precession_on_pitch |
Douglas DC-3( gyro_precession_on_pitch = 1.0 ) Piper Cub( gyro_precession_on_pitch = 0.3 ) |
Chaque type d'avion, męme un planeur, doit avoir cette section dans le fichier aircraft.cfg. Essentiellement, cette section décrit le type et le nombre de moteurs, leur position, et un nombre donnant le débit de carburant dont le moteur a besoin pour produire la puissance calculée.
| Propriété | Description | Exemples |
| engine_type | Un nombre entier qui indique quel type de moteur est monté sur l'avion : 0 = piston, 1 = Jet, 2 = None, 3 = helo-turbine, 4 = fusée (non supporté) 5 = Turboprop. |
Airbus A321( engine_type = 1 ) Aircreation582SL( engine_type= 0 ) Beech Baron 58( engine_type = 0 ) Beech King Air 350( engine_type = 5 ) |
|
engine.0 to engine.n |
Décalage (en pieds) entre le moteur et le point de référence Reference_Datum_Position (longitudinal, transversal et vertical). Chaque emplacement d'un moteur augmente le nombre de moteurs (maximum de quatre moteurs autorisés). |
Airbus A321( Engine.0 = 4.75, -16.1, -4.5 ) Aircreation582SL( Engine.0= -3.000, 0.000, 2.000 ) Beech Baron 58( Engine.0 = -1.4, -5.3, 0.0 ) Boeing 747-400( Engine.0 = -107.5, -69.5, -6.9 ) Boeing 747-400( Engine.1 = -76.0, -38.9, -10.4 ) Boeing 747-400( Engine.2 = -76.0, 38.9, -10.4 ) Boeing 747-400( Engine.3 = -107.5, 69.5, -6.9 ) |
| fuel_flow_scalar | Nombre pour modifier le débit de carburant exigé par un moteur. Une valeur inférieure ŕ 1,0 provoque une consommation plus faible pour un réglage donné du moteur. Une valeur supérieure ŕ 1,0 fait que l'avion brűle plus de carburant pour un réglage de puissance donné. |
Airbus A321( fuel_flow_scalar = 1 ) Aircreation582SL( fuel_flow_scalar= 1.000 ) Boeing 747-400( fuel_flow_scalar = 1.0 ) Beech Baron 58( fuel_flow_scalar= 0.9 ) |
| min_throttle_limit | Définit la position minimale des gaz (en % du maximum). Normalement 0 pour un moteur ŕ pistons, et -0,25 les moteurs ŕ turbine avec inverseurs de poussée (reverse thrust). |
Airbus A321( min_throttle_limit = -0.25 ) Aircreation582SL( min_throttle_limit=0.000000 ) Boeing 747-400( min_throttle_limit = -0.25; ) Beech Baron 58( min_throttle_limit = 0.0; ) |
| max_contrail_temperature | Température ambiante, en °Celsius, ŕ laquelle les trainées de condensation se déclenchent. La valeur par défault est -39 °C pour les moteurs ŕ turbine. Pour les moteurs ŕ pistons, l'effet trainée est coupé, ŕ moins qu'une valeur de température soit spécifiée ici. | Airbus A321( max_contrail_temperature = -30 ) |
| master_ignition_switch | 1=disponible, 0=non disponible (par défaut). Si disponible, cet interrupteur doit ętre sur ON pour permettre l'allumage des moteurs et donc leur fonctionnement. Le mettre sur OFF arręte les moteurs. | Douglas DC-3( master_ignition_switch = 1 ) |
| starter_type | Mis ŕ 1 pour un démarrage manuel. |
(du Flight Simulator 2004) Curtiss Jenny( starter_type = 1 ) |
| thrustanglepitchheading.0 | Angles de poussée et de cap en degrés (poussée positive vers le bas, cap positif vers la droite). | Cessna Skyhawk 172SP Paint1 ( ThrustAnglePitchHeading.0 = 0,0 ) |
Un moteur ŕ turbine enflamme le mélange de carburant et d'air comprimé pour créer une poussée. Ces paramčtres définissent la puissance (poussée) de sortie d'un moteur ŕ réaction donné.
| Propriété | Description | Exemples |
| fuel_flow_gain | Constante de gain du débit de carburant. |
Airbus A321( fuel_flow_gain = 0.002 ) Boeing 747-400( fuel_flow_gain = 0.002 ) Beech King Air 350( fuel_flow_gain = 0.011 ) Bombardier CRJ 700( fuel_flow_gain = 0.0025 ) |
| inlet_area | Aire de l'entrée d'air de la nacelle moteur (en pieds carrés). |
Airbus A321( inlet_area = 19.6 ) Boeing 747-400( inlet_area = 60.0 ) Beech King Air 350( inlet_area = 1.0 ) Bombardier CRJ 700( inlet_area = 9.4 ) |
| rated_n2_rpm | Régime (en t/min) du 2e étage de compresseur. |
Airbus A321( rated_N2_rpm = 29920 ) Boeing 747-400( rated_N2_rpm = 29920 ) Cessna Grand Caravan( rated_N2_rpm = 33000 ) |
| static_thrust | Poussée maximale (en livres) au niveau de la mer. |
Airbus A321( static_thrust = 23500 ) Boeing 747-400( static_thrust = 56750 ) Beech King Air 350( static_thrust = 158 ) Bombardier CRJ 700( static_thrust = 12670 ) |
| afterburner_available |
Valeur logique indiquant si la post-combustion est disponible ou non.
0 = FALSE (non), 1 = TRUE (oui). |
Airbus A321( afterburner_available = 0 ) Boeing 747-400( afterburner_available = 0 ) |
| reverser_available | Spécifie le rapport sur l'effet des inverseurs de poussée. Une valeur 0 rend l'inverseur de poussée non disponible. Une valeur de 1,0 rend la poussée inverse normale théorique disponible. Les autres valeurs calculent la poussée en proportion. |
Airbus A321( reverser_available = 1 ) Boeing 747-400( reverser_available = 1 ) |
| thrustspecificfuelconsumption | Consommation de carburant spécifique du réacteur. C'est le rapport "carburant utilisé en livres par heure" sur "poussée en livres". S'applique ŕ toutes les vitesses. |
Boeing 737-800 Paint1( ThrustSpecificFuelConsumption = 0.6
) Boeing 747-400 Paint1( ThrustSpecificFuelConsumption = 0.4 ) |
| afterburnthrustspecificfuelconsumption | Consommation de carburant spécifique du réacteur. C'est le rapport "carburant utilisé en livres par heure" sur "poussée en livres". S'applique seulement quand la post-combustion est active. | Boeing 737-800 Paint1( AfterBurnThrustSpecificFuelConsumption = 0 ) |
Le paramčtre Thrust_scalar met ŕ l'échelle la poussée calculée pour les moteurs ŕ réaction. (la poussée est prise dans la section [TurbineEngineData] ).
| Propriété | Description | Exemples |
| thrust_scalar | Paramčtre qui met ŕ l'échelle la poussée calculée fournie par l'hélice. | Airbus A321( thrust_scalar = 1.0 ) |
Ces paramčtres configurent les caractéristiques du systčme électrique de l'avion et de ses composantes. Chaque appareil possčde une batterie ainsi qu'un alternateur ou générateur pour chaque moteur.
Ci-dessous un tableau des paramčtres électriques avec les valeurs par défaut pour Type de bus, courant maxi (A) et tension mini (V) (ces valeurs sont appliquées si les paramčtres sont omis). La valeur par défaut Min Voltage est égale ŕ 0,7 * Tension Max de la batterie. La liste des composants reflčte également l'ensemble des systčmes effectivement reliés au systčme électrique. Si un composant est inclus dans la liste, mais que l'avion ne le possčde pas réellement, il est tout simplement ignoré.
Spécifie ŕ quel réseau du systčme électrique le composant est connecté, en suivant le codage suivant :
| Type de réseau | Réseau (bus) |
| 0 | Réseau principal (la plupartdes composants sont connectés ici) |
| 1 | Réseau de l'avionique |
| 2 | Réseau de la batterie |
| 3 | Réseau Hot Batterys (court-circuite l'interrupteur général (Master switch)) |
| 4 | Réseau du générateur/alternateur 1 (fonction du moteur 1) |
| 5 | Réseau du générateur/alternateur 2 (fonction du moteur 2) |
| 6 | Réseau du générateur/alternateur 3 (fonction du moteur 3) |
| 7 | Réseau du générateur/alternateur 4 (fonction du moteur 4) |
Max Amp Load est le courrant (en Ampčres) exigé pour alimenter le composant, et représente une charge additionnelle sur le systčme électrique.
Min Voltage est la tension (en Volts) minimale de fonctionnement du composant sur le réseau spécifié.
| Propriété | Description | Exemples |
| flap_motor | Type de réseau, courant maxi, tension mini | Airbus A321( flap_motor = 0, 5 , 17.0 ) |
| gear_motor | Type de réseau, courant maxi, tension mini | Airbus A321( gear_motor = 0, 5 , 17.0 ) |
| autopilot | Type de réseau, courant maxi, tension mini | Airbus A321( autopilot = 0, 5 , 17.0 ) |
| avionics_bus | Type de réseau, courant maxi, tension mini |
Airbus A321( avionics_bus = 0, 5, 17.0 ) Boeing 747-400( avionics_bus = 0, 5 , 17.0 ) Bombardier CRJ 700( avionics_bus = 0, 5 , 9.5 ) |
| avionics | Type de réseau, courant maxi, tension mini |
Airbus A321( avionics = 1, 5 , 17.0 ) Bombardier CRJ 700( avionics = 1, 5 , 9.5 ) |
| pitot_heat | Type de réseau, courant maxi, tension mini | Airbus A321( pitot_heat = 0, 2 , 17.0 ) |
| additional_system | Type de réseau, courant maxi, tension mini |
Airbus A321( additional_system = 0, 2, 17.0 ) Beech King Air 350( additional_system = 0, 2 , 17.0 ) Bombardier CRJ 700( additional_system = 0, 2 , 9.5 ) |
| marker_beacon | Type de réseau, courant maxi, tension mini |
Airbus A321( marker_beacon = 1, 2 , 17.0 ) Bombardier CRJ 700( marker_beacon = 1, 2 , 9.0 ) |
| gear_warning | Type de réseau, courant maxi, tension mini | Airbus A321( gear_warning = 0, 2 , 17.0 ) |
| fuel_pump | Type de réseau, courant maxi, tension mini |
Airbus A321( fuel_pump = 0, 5 , 17.0 ) Bombardier CRJ 700( fuel_pump = 0, 5 , 9.0 ) |
| starter1 | Type de réseau, courant maxi, tension mini | Airbus A321( starter1 = 0, 20, 17.0 ) |
| starter2 | Type de réseau, courant maxi, tension mini | |
| starter3 | Type de réseau, courant maxi, tension mini | |
| starter4 | Type de réseau, courant maxi, tension mini | |
| light_nav | Type de réseau, courant maxi, tension mini | Airbus A321( light_nav = 0, 5 , 17.0 ) |
| light_beacon | Type de réseau, courant maxi, tension mini | Airbus A321( light_beacon = 0, 5 , 17.0 ) |
| light_landing | Type de réseau, courant maxi, tension mini | Airbus A321( light_landing = 0, 5 , 17.0 ) |
| light_taxi | Type de réseau, courant maxi, tension mini | Airbus A321( light_taxi = 0, 5 , 17.0 ) |
| light_strobe | Type de réseau, courant maxi, tension mini | Airbus A321( light_strobe = 0, 5 , 17.0 ) |
| light_panel | Type de réseau, courant maxi, tension mini | Airbus A321( light_panel = 0, 5 , 17.0 ) |
| light_cabin | Type de réseau, courant maxi, tension mini | |
| prop_sync | Type de réseau, courant maxi, tension mini | |
| auto_feather | Type de réseau, courant maxi, tension mini | |
| auto_brakes | Type de réseau, courant maxi, tension mini | |
| standby_vacuum | Type de réseau, courant maxi, tension mini | |
| hydraulic_pump | Type de réseau, courant maxi, tension mini | |
| fuel_transfer_pump | Type de réseau, courant maxi, tension mini | |
| propeller_deice | Type de réseau, courant maxi, tension mini | |
| light_recognition | Type de réseau, courant maxi, tension mini | |
| light_wing | Type de réseau, courant maxi, tension mini | |
| light_logo | Type de réseau, courant maxi, tension mini | |
| directional_gyro | Type de réseau, courant maxi, tension mini | |
| directional_gyro_slaving | Type de réseau, courant maxi, tension mini | |
| max_battery_voltage | La tension maximale ŕ laquelle la batterie peut ętre chargée (V). C'est aussi la tension disponible ŕ la batterie quand l'avion est initialisé. La tension de la batterie va décroître ŕ partir de cette valeur si les générateurs ou alternateurs ne fournissent pas assez de courant pour couvrir la consommation des composants actifs. |
Beech Baron 58( max_battery_voltage = 24.0 ) DeHavilland Beaver DHC2( max_battery_voltage = 24 ) Extra 300S( max_battery_voltage = 12.0 ) Maule M7 260C( max_battery_voltage = 12.0 ) |
| generator_alternator_voltage | Tension des générateurs ou alternateurs (V). |
Beech Baron 58( generator_alternator_voltage= 28.0 ) Bombardier CRJ 700( generator_alternator_voltage = 25.0 ) DeHavilland Beaver DHC2( generator_alternator_voltage = 28 ) Douglas DC-3( generator_alternator_voltage = 25 ) |
| max_generator_alternator_amps | Courant maximal des générateurs/alternateurs (A). |
Beech Baron 58( max_generator_alternator_amps= 60.0 ) Bombardier CRJ 700( max_generator_alternator_amps = 40.0 ) DeHavilland Beaver DHC2( max_generator_alternator_amps = 50 ) Douglas DC-3( max_generator_alternator_amps = 100 ) |
| engine_generator_map | Liste d'indicateurs, correspondant au nombre de moteurs s'il y a un générateur configuré avec le moteur. |
(From Flight Simulator 2004) Ford 4-AT-E Tri-Motor( engine_generator_map= 0,1,0 ) |
| electric_always_available | Mis ŕ 1 si la puissance électrique est disponible, quel que soit l'état de la batterie ou du circuit. |
Vous pouvez configurer et ajuster la façon dont l'appareil réagit ŕ différents types de contact, y compris le contact et l'articulation du train d'atterrissage, le freinage, la direction, et les dommages dus ŕ une vitesse excessive. Vous pouvez également configurer chaque point de contact de façon indépendante pour chaque avion, et il n'y a pas de limite au nombre de points que vous pouvez ajouter. Lors de l'importation un avion qui ne contient pas cet ensemble de données, le programme les générera ŕ partir du fichier .air, puis les écrira dans le fichier aircraft.cfg.
Chaque point de contact contient une série de valeurs qui définissent les caractéristiques du point, séparés par des virgules. Un point de contact a 16 paramčtres, décrits dans la table ci-dessous.
| Paramčtre du point de contact (et exemple) | Elément | Description |
| 1 (1) | Classe | Nombre entier definissant le type de point de contact : 0 = aucun, 1 = roue, 2 = frottement, 3 = glissement, 4 = Flotaison, 5 = gouvernail marin |
| 2 (-18.0) | Position longitudinale | Distance longitudinale du point de contact par rapport au point de référence (en pieds). Positif vers l'avant. |
| 3 (0) | Position latérale | Distance latérale du point de contact par rapport au point de référence (en pieds). Positif ŕ tribord (ŕ droite, vu d'en haut, l'avion pointant vers le haut). |
| 4 (-3.35) | Position verticale | Distanceverticale du point de contact par rapport au point de référence (en pieds). Positif vers le haut. |
| 5 (3200) | Seuil de dommage ŕ l'impact-sol en pieds/minute | La vitesse (en pieds/min) ŕ la laquelle un impact avec le sol peut causer un dommage. |
| 6 (0) | Répartition des freins |
Définit quelle commande de frein pilote les freins (roues
seulement). 0 = aucun, 1 = frein gauche, 2 = frein droit. |
| 7 (0.50) | Rayon de la roue | Rayon de la roue (en pieds). |
| 8 (180) | Angle de braquage | L'angle maximal (positif et négatif) don't roue peut pivoter (en degrés). |
| 9 (0.25) | Compression statique | La distance dont le train d'atterrissage est comprimée quand l'avion vide est ŕ l'arręt au sol (en pieds). Cette valeur définit la force du support de roue. Une valeur plus petite augmente la raideur du support. |
| 10 (2.5) | Rapport entre Compression Maximum et Compression Statique | Rapport entre la compression dynamique maximale disponible dans le support de roue et la valeur statique. Peut ętre utile en le coordonnant avec la compression du support ŕ l'atterrissage. |
| 11 (0.90) | Taux d'amortissement | Ce taux décrit comment les oscillations de réaction avec le sol sont amorties. Une valeur de 1,0 donne l'amortissement critique, c'est ŕ dire sans ou avec peu d'oscillation. Un rapport de 0,0 signifie "non amorti", avec des oscillations qui continuent avec une amplitude constante. Les valeurs négatives conduisent ŕ une maniabilité au sol instable, et les valeurs supérieures ŕ 1,0 peuvent aussi causer des instabilités par sur-amortissement. Les valeurs typiques vont de 0,6 ŕ 0,95. |
| 12 (1.0) | Durée du déploiement du train | Le temps nécessaire au train d'atterrissage pour se déployer totalement dans les conditions normales (en secondes). Une valeur 0 indique un train fixe. |
| 13 (4.0) | Durée de rétraction du train | Le temps nécessaire au train d'atterrissage pour se rétracter totalement dans les conditions normales (en secondes). Une valeur 0 indique un train fixe. |
| 14 (0) | Type de son | Ce nombre entier fait correspondre un point de contact avec un type de son : |
| 0 = train central, | ||
| 1 = train auxiliaire, | ||
| 2 = train gauche, | ||
| 3 = train droit, | ||
|
|
4 = frottement du fuselage, | |
| 5 = frottement de l'aile gauche, | ||
| 6 = frottement de l'aile droite, | ||
| 7 = frottement Aux1, | ||
| 8 = frottement Aux2, | ||
| 9 = frottement de la queue. | ||
| 15 (0) | Limite de vitesse air | La vitesse (en noeuds) ŕ laquelle le déploiement du train devient impossible. Non utilisé pour les points de frottement ou les trains non rétractables. |
| 16 (200) | Dommages dus ŕ la vitesse air | La vitesse (en noeuds) au delŕ de laquelle les dommages s'accumulent sur le train d'atterrissage. Non utilisé pour les points de frottement ou les trains non rétractables. |
Chaque donnée de l'ensemble des point de contact prend la forme “point.n=”, oů “n” is un index, suivi des données.
| Propriété | Description | Exemples |
|
point.0 to point.n |
Points de contact respectant le format ci-dessus. |
Airbus A321( point.0=1, 40.00, 0.00, -8.40, 1181.1, 0, 1.442,
55.92, 0.6, 2.5, 0.9, 4.0, 4.0, 0, 220.0, 250.0 ) Aircreation582SL( point.0= 1.000, 2.583, 0.000, -1.000, 1574.803, 0.000, 0.504, 31.860, 0.235, 2.500, 0.731, 0.000, 0.000, 0.000, 0.000, 0.000 ) Beech Baron 58( point.0 = 1, 0.82, 0.00, -3.77, 1600, 0, 0.633, 40, 0.42, 4.0, 0.90, 3.0, 3.0, 0, 152, 180 ) Boeing 747-400( point.0 = 1, -25.0, 0.0, -17.5, 1000.0, 0, 2.0, 70.0, 0.5, 3.5, 0.900, 9.0, 8.0, 0, 220, 250 ) Boeing 747-400( point.1 = 1, -114.0, -18.0, -21.3, 2000.0, 1, 2.0, 13.0, 3.0, 2.5, 0.900, 11.0, 9.0, 2, 220, 250 ) Boeing 747-400( point.2 = 1, -114.0, 18.0, -21.3, 2000.0, 2, 2.0, 13.0, 3.0, 2.5, 0.900, 11.0, 9.0, 3, 220, 250 ) Boeing 747-400( point.3 = 2, -152.6, -103.5, 3.0, 700.0, 0, 0.0, 0.0, 0.0, 0.0, 0.000, 0.0, 0.0, 5, 0, 0 ) Boeing 747-400( point.4 = 2, -152.6, 103.5, 3.0, 700.0, 0, 0.0, 0.0, 0.0, 0.0, 0.000, 0.0, 0.0, 6, 0, 0 ) Boeing 747-400( point.5 = 2, 3.0, 0.0, 0.0, 700.0, 0, 0.0, 0.0, 0.0, 0.0, 0.000, 0.0, 0.0, 9, 0, 0 ) Boeing 747-400( point.6 = 2, -222.7, 0.0, 4.0, 700.0, 0, 0.0, 0.0, 0.0, 0.0, 0.000, 0.0, 0.0, 4, 0, 0 ) |
| max_number_of_points | Nombre entier indiquant le nombre maximal de points de contact que le programme va rechercher. | Airbus A321( max_number_of_points = 21 ) |
| static_pitch | L'angle statique d'inclinaison longitudinal de l'avion quand il est ŕ l'arręt au sol (en degrés). Le programme utilise cette valeur pour positionner l'avion au démarrage, en montée, et ŕ tout autre moment quand la simulation n'est pas active. |
Airbus A321( static_pitch=0.04 ) Aircreation582SL( static_pitch= 0.000 ) Boeing 747-400( static_pitch = -1.5 ) Beech Baron 58( static_pitch = 1.56 ) |
| static_cg_height | La hauteur statique de l'avion quand il est ŕ l'arręt au sol (en pieds). Le programme utilise cette valeur pour positionner l'avion au démarrage, en montée, et ŕ tout autre moment quand la simulation n'est pas active. |
Airbus A321( static_cg_height=7.67 ) Aircreation582SL( static_cg_height= 1.000 ) Boeing 747-400( static_cg_height = 18.6 ) Beech Baron 58( static_cg_height = 3.43 ) |
| gear_system_type |
Ce paramčtre définit le type de systčme qui pilote les mouvements du
train d'atterrissage. 0 = électrique 1 = hydraulique 2 = pneumatique 3 = manuel 4 = aucun |
Airbus A321( gear_system_type=1 ) Beech Baron 58( gear_system_type=0 ) DeHavilland Beaver DHC2( gear_system_type=3 ) |
| emergency_extension_type |
Une valeur parmi : Aucun=0, pompe=1, gravité=2. |
Bombardier CRJ 700( emergency_extension_type=2 ) |
| tailwheel_lock | Valeur logique indiquant si la roulette de queue peut ętre verrouillée ou non (applicable aux avions avec roulette de queue). | Douglas DC-3( tailwheel_lock = 1 ) |
Les paramčtres suivants définissent les fonctionnalités du systčme d'alarme du train de l'avion. C'est généralement une fonction des positions de manette des gaz et des volets.
| Propriété | Description | Exemples |
| gear_warning_available | Fixe le type d'alarme de train disponible sur l'avion : 0 = aucun, 1 = Normal, 2 = Amphibie (alarme audible pour l'eau par rapport au réglage pour le sol). | Airbus A321( gear_warning_available = 1 ) |
| pct_throttle_limit | La limite des gaz au-dessous de laquelle l'alarme sonore du train sera activée si le train n'est pas sorti et verrouillé alors que les volets sont sortis au moins du paramčtre de flap_limit_idle ci-dessous. Cette limite pour les volets peut ętre 0 de sorte que l'avertissement est effectivement une fonction de la manette des gaz. Valeur : entre 0 (ralenti) et 1,0 (gaz ŕ fond). | Airbus A321( pct_throttle_limit = 0.1 ) |
| flap_limit_idle | En association avec la limite des gaz spécifiée ci-dessus, cette limite est le déploiement des volets au delŕ duquel l'alarme s'activera si le train n'est pas sorti et verrouillé, alors que les gaz sont sous la limite spécifiée ci-dessus. En réglant cette limite ŕ une valeur supérieure ŕ 0, le pilote peut mettre les gaz au ralenti sans déclencher l'alarme. Ceci est souvent utilisé sur les jets pour décélérer et descendre l'avion. |
Airbus A321( flap_limit_idle = 5.0 ) Beech Baron 58( flap_limit_idle = 0.0 ) Beech King Air 350( flap_limit_idle = 15.0 ) |
| flap_limit_power | La limite de sortie des volets au delŕ de laquelle l'alarme se déclenchera (quelle que soit la position des gaz). |
Airbus A321( flap_limit_power = 25.5 ) Beech Baron 58( flap_limit_power = 31.5 ) Beech King Air 350( flap_limit_power = 30.0 ) Douglas DC-3( flap_limit_power = 16.0 ) |
Les paramčtres suivants décrivent le systčme de freinage de l'avion.
| Propriété | Description | Exemples |
| parking_brake | Valeur logique indiquant si un frein de parking est disponible sur l'avion. |
Airbus A321( parking_brake = 1 ) Aircreation582SL( parking_brake=1 ) DeHavilland Beaver DHC2( parking_brake = 0 ) |
| toe_brakes_scale | Fixe l'efficacité du freinage : 1,0 est la valeur par défaut, et 0,0 indique une efficacité nulle. |
Airbus A321( toe_brakes_scale = 0.885 ) Aircreation582SL( toe_brakes_scale=1.000031 ) Boeing 747-400( toe_brakes_scale = 1.24 ) Beech Baron 58( toe_brakes_scale = 1.0 ) |
| auto_brakes | Le nombre d'incréments dont l'interrupteur de freinage automatique peut ętre tourné. |
Airbus A321( auto_brakes = 3 ) Boeing 737-800( auto_brakes = 4 ) Beech Baron 58( auto_brakes = 0 ) |
| hydraulic_system_scalar | Le rapport entre la pression actuelle et la pression maximale du systčme hydraulique de freinage. | Airbus A321( hydraulic_system_scalar = 1 ) |
| differential_braking_scale | Le freinage différentiel est une fonction de l'actionnement des deux freins et de l'action sur le palonnier. La différence entre les freins gauche et droite est réglée par cette valeur. 1,0 est le réglage normal si le freinage différentiel est souhaité (en particulier sur les avions avec roulette de queue). 0.0 est le réglage si aucun freinage différentiel n'est souhaité. | Douglas DC-3( differential_braking_scale = 1.0 ) |
Les paramčtres suivants décrivent le systčme hydraulique de l'avion.
| Propriété | Description | Exemples |
| normal_pressure | La pression normale de fonctionnement du systčme hydraulique en livres par pouce carré. |
Airbus A321( normal_pressure = 3000.0 ) Aircreation582SL( normal_pressure=0.000000 ) Beech Baron 58( normal_pressure = 0.0 ) DeHavilland Beaver DHC2( normal_pressure = 1000.0 ) |
| electric_pumps | Le nombre de pompes hydrauliques électriques qui équippent l'avion. |
Airbus A321( electric_pumps = 0 ) Boeing 737-800( electric_pumps = 1 ) |
| engine_map | Cette série d'indicateurs dit si les différents moteurs de l'avion sont configurés avec des pompes hydrauliques. Les indicateurs concernent les moteurs dans l'ordre de gauche ŕ droite, en partant celui le plus ŕ gauche. Par défaut, tous les moteurs sont équipés pour actionner une pompe hydraulique. |
Airbus A321( engine_map = 1,1,0,0 ) Boeing 747-400( engine_map = 1,1,1,1 ) Cessna Grand Caravan( engine_map = 1,0,0,0 ) DeHavilland Beaver DHC2( engine_map = 1 ) |
Les paramčtres suivants décrivent les points de vue du pilote.
| Propriété | Description | Exemples |
| eyepoint | Longitude, latitude et position verticale (en pieds) depuis le point de référence de l'avion. |
Airbus A321( eyepoint=48.2, -1.35, 1.7 ) Aircreation582SL( eyepoint=-0.205052,0.000000,3.604314 ) Boeing 747-400( eyepoint = -18.55, -1.97, 10.7 ) Beech Baron 58( eyepoint = -8.213, -0.8612, 2.220 ) |
| zoom | Zoom : éloigne ou rapproche le point de vue. | Default( zoom=1.0 ) |
Pour chaque ensemble de volets présent sur l'appareil, une section correspondante [flaps.n] devrait exister. La plupart des appareils d'aviation générale et de jets plus petits n'ont qu'une seule série de volets (bord de fuite), mais il est typique pour les grands avions commerciaux d'avoir un ensemble de volets de bord d'attaque en plus des volets de bord de fuite. Le nombre d'ensembles de volets est déterminé par le nombre de sections [flaps.n] contenues dans le fichier aircraft.cfg.
| Propriété | Description | Exemples |
| type |
Un nombre entier qui indique s'il existe un ensemble de volets de
bord d'attaque ou de fuite : 0 = pas de volet, 1 = bord de fuite, 2 = bord d'attaque. |
Airbus A321( type = 1 ) Aircreation582SL( type=0 ) Boeing 737-800( type = 2 ) Cessna Grand Caravan( type=1 ) |
| span-outboard | Le pourcentage de l'envergure ŕ mi-aile sur lequel le volet s'étend (ŕ partir de l'intersection aile-fuselage). |
Airbus A321( span-outboard = 0.8 ) Aircreation582SL( span-outboard=0.500000 ) Beech Baron 58( span-outboard = 0.41 ) Beech King Air 350( span-outboard = 0.5 ) |
| extending-time | Temps nécessaire ŕ l'ensemble de volets pour sortir en entier (en secondes). |
Airbus A321( extending-time = 20 ) Aircreation582SL( extending-time=0.000000 ) Boeing 737-800( extending-time = 2 ) Boeing 747-400( extending-time = 25 ) |
|
flaps-position.0 to flaps-position.n |
Chaque élément du tableau de position des volets indique l'angle de déflexion que prennent les volets (en degrés). Le plus grand angle de déviation est celui utilisé pour les pleins volets. |
Cessna Grand Caravan( flaps-position.0= 0 ) DG808S( flaps-position.0 = -9.0 ) Maule M7 260C( flaps-position.0 = -7 ) Airbus A321( flaps-position.0 = 0 ) Airbus A321( flaps-position.1 = 1 ) Airbus A321( flaps-position.2 = 2) Airbus A321( flaps-position.3 = 5 ) Airbus A321( flaps-position.4 = 10 ) Airbus A321( flaps-position.5 = 15 ) Airbus A321( flaps-position.6 = 25 ) Airbus A321( flaps-position.7 = 30 ) Airbus A321( flaps-position.8 = 40 ) |
| damaging-speed | Vitesse ŕ laquelle les volets seront endommagés (en noeuds air, ou Knots Indicated Airspeed, KIAS). |
Airbus A321( damaging-speed = 250 ) Boeing 747-400( damaging-speed = 200 ) Beech Baron 58( damaging-speed = 152 ) Cessna Skyhawk 172SP( damaging-speed = 120 ) |
| blowout-speed | Vitesse ŕ laquelle les volets seront arrachés de l'avion (en noeuds air, ou Knots Indicated Airspeed, KIAS).. |
Airbus A321( blowout-speed = 300 ) Boeing 747-400( blowout-speed = 250 ) Cessna Skyhawk 172SP( blowout-speed = 150 ) Cessna Grand Caravan( blowout-speed = 175 ) |
| lift_scalar | Le pourcentage de portance totale due ŕ la déflexion totale de cet ensemble de volets. |
Airbus A321( lift_scalar = 1.0 ) Boeing 747-400( lift_scalar = 0.7 ) |
| drag_scalar | Le pourcentage de traînée totale due ŕ la déflexion totale de cet ensemble de volets. |
Airbus A321( drag_scalar = 1.0 ) Boeing 747-400( drag_scalar = 0.9 ) |
| pitch_scalar | Le pourcentage de portance totale due ŕ la déflexion totale de cet ensemble de volets. |
Airbus A321( pitch_scalar= 1.0 ) Boeing 747-400( pitch_scalar= 0.9 ) |
| system_type |
Nombre entier qui indique quel type de systčme pilote le mouvement
des volets. Un parmi : 0 = Electrique 1 = Hydraulique 2 = Pneumatique 3 = Manuel 4 = Aucun |
Airbus A321( system_type = 1 ) Aircreation582SL( system_type=0 ) Cessna Skyhawk 172SP( system_type = 0 ) DG808S( system_type = 3 ) |
Il devrait y avoir une section radio dans chaque aircraft.cfg. Cette section configure les radios pour chaque avion. Chacun des mots-clés suivants a un indicateur (flag) ou un ensemble d'indicateurs qui déterminent si l'élément particulier de la radio est disponible dans l'avion. Un «1 » est utilisé pour vrai (ou disponible), et 0 pour faux (ou non disponible).
| Propriété | Description | Exemples |
| audio.1 | Mis ŕ 1 s'il y a panel audio. |
Airbus A321( Audio.1 = 1 ) DG808S( Audio.1 = 0 ) |
| com.1 | Deux indicateurs : le 1er est mis ŕ 1 si Com 1 est disponible, et le second s'il supporte une fréquence de veille (standby). |
Airbus A321( Com.1 = 1, 1 ) Beech King Air 350( Com.1 = 1, 0 ) |
| com.2 | Deux indicateurs : le 1er est mis ŕ 1 si Com 2 est disponible, et le second s'il supporte une fréquence de veille (standby). Vous ne pouvez pas avoir Com 2 sans avoir Com 1. |
Airbus A321( Com.2 = 1, 1 ) Beech King Air 350( Com.2 = 1, 0 ) |
| nav.1 | Trois indicateurs : le 1er est mis ŕ 1 si Nav 1 est disponible, le 2e s'il supporte une fréquence de veille (standby), et le 3e s'il supporte une indication glideslope (ILS). |
Airbus A321( Nav.1 = 1, 1, 1 ) Beech King Air 350( Nav.1 = 1, 0, 1 ) DG808S( Nav.1 = 0, 0, 0 ) |
| nav.2 | Trois indicateurs : le 1er est mis ŕ 1 si Nav 2 est disponible, le 2e s'il supporte une fréquence de veille (standby), et le 3e s'il supporte une indication glideslope (ILS).Vous ne pouvez pas avoir Nav 2 sans avoir Nav 1. |
Airbus A321( Nav.2 = 1, 1, 0 ) Beech King Air 350( Nav.2 = 1, 0, 0 ) |
| adf.1 | Mis ŕ 1 s'il y a un récepteur ADF. |
Airbus A321( Adf.1 = 1 ) DG808S( Adf.1 = 0 ) |
| adf.2 | Mis ŕ 1 s'il y a un récepteur ADF 2. | Bombardier CRJ 700( Adf.2 = 1 ) |
| transponder.1 | Mis ŕ 1 s'il y a un transpondeur. |
Airbus A321( Transponder.1 = 1 ) DG808S( Transponder.1 = 0 ) |
| marker.1 | Mis ŕ 1 s'il y a un récepteur pour les balises marker. |
Airbus A321( Marker.1 = 1 ) DG808S( Marker.1 = 0 ) |
Chaque lampe qui a besoin d'un effet spécial doit ętre listée dans cette section. Le tableau suivant donne les codes pour les commutateurs de commande des feux.
| Code | Interrupteur |
| 1 | Beacon (balise) |
| 2 | Strobe (feu ŕ éclats) |
| 3 | Navigation or Position |
| 4 | Cockpit (poste de pilotage) |
| 5 | Landing (atterrissage) |
| 6 | Taxi (roulage au sol) |
| 7 | Recognition (reconnaissance) |
| 8 | Wing (aile) |
| 9 | Logo (logo ou image) |
| 10 | Cabin (cabine) |
| Propriété | Description | Exemples |
|
light.0 ŕ light.n |
La premičre donnée dans la ligne définit ŕ quel circuit, ou interrupteur, le feu est connecté ŕ (voir le tableau des codes ci-dessus). Plusieurs feux peuvent ętre commandés par męme interrupteur. Les trois données suivantes sont les positions longitudinale, latérale et verticale du feu, en pieds. La derničre donnée est le nom du fichier de l'effet spécial qui est déclenché (par exemple, fx_navred). Ces fichiers ont des extensions .fx et doivent se trouver dans le dossier des effets (...\effects\) de Microsoft Flight Simulator X. |
Automobile( light.0 = 1, 9.5, 3.1, 3.0, fx_navred ) VEH_air_FuelTruck100LL( light.0 = 1 ) Tower Controller( light.0 = 1, 0.00, 0.00, 10.00, fx_vclight ) Automobile( light.1 = 1, 9.5, -3.1, 3.0, fx_navred ) VEH_air_FuelTruck100LL( light.1 = 1 ) Automobile( light.2 = 2, -9.3, 3.2, 3.2, fx_navred ) VEH_air_FuelTruck100LL( light.2 = 2 ) |
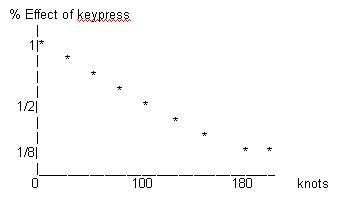
Les commandes de vol peut ętre manipulée par le clavier. Parce que les commandes de vol deviennent naturellement plus sensibles quand la vitesse augmente, il peut devenir assez difficile de maîtriser l'avion au clavier ŕ des vitesses élevées. Pour résoudre ce problčme, le nombre d'incréments pour une seule pression de touche d'une commande de vol est divisé par 2 ŕ la premičre vitesse air (en noeuds) figurant sur la ligne pour la commande correspondante, et diminué de 1/8 ŕ la 2e vitesse, et d''un rapport interpolé ŕ partir de ces valeurs pour toutes les vitesses entre les deux. L'exemple ci-dessous montre que la gouverne de profondeur s'incrémente d'un degré quand la vitesse est égale ŕ zéro, de ľ de degré ŕ 50 noeuds, d'un ˝ de degré ŕ 100 noeuds, de 5/16 de degré ŕ 140 noeuds, et de 1/8 d'un degré ŕ 180 noeuds ou au-delŕ.
| Propriété | Description | Exemples |
| elevator | Deux niveaux de vitesse air pour les incréments par les pressions au clavier. |
Airbus A321( elevator = 150, 250 ) Aircreation582SL( elevator=150.000000,250.000000 ) Cessna Skyhawk 172SP( elevator = 100, 180 ) DG808S( elevator = 160, 360 ) |
| aileron | Deux niveaux de vitesse air pour les incréments par les pressions au clavier. |
Airbus A321( aileron = 150, 250 ) Aircreation582SL( aileron=150.000000,250.000000 ) Cessna Skyhawk 172SP( aileron = 200, 1000 ) DG808S( aileron = 160, 360 ) |
| rudder | Deux niveaux de vitesse air pour les incréments par les pressions au clavier. |
Airbus A321( rudder = 150, 250 ) Aircreation582SL( rudder=150.000000,250.000000 ) Cessna Skyhawk 172SP( rudder = 200, 1000 ) DG808S( rudder = 160, 360 ) |
Cette section est utilisée pour définir les caractéristiques des indicateurs de direction sur les tableaux de bord, mais ne comprend pas le compas magnétique (qui possčde sa propre section). La liste des indicateurs doit ętre numérotée dans l'ordre: 0,1,2, ... n.
| Propriété | Description | Exemples |
|
direction_indicator.0 to direction_indicator.n |
Un ou deux codes. Si l'indicateur vaut 4, alors il doit y avoir deux
données (l'indicateur, et l'indicateur auquel celui-ci est asservi).
Les codes des indicateurs codes sont : 0 = aucun 1 = gyroscope ŕ vide 2 = gyroscope électrique 3 = compas électromagnétique asservi 4 = asservi ŕ un autre indicateur |
Airbus A321( direction_indicator.0=3,0 ) Aircreation582SL( direction_indicator.0 = 0 ) Cessna Skyhawk 172SP( direction_indicator.0=1,0 ) DG808S( direction_indicator.0=0,0 ) Douglas DC-3( direction_indicator.1=2,0 ) |
|
induction_compass.0 to induction_compass.n |
S'il y a un compas ŕ induction, la valeur est une parmi : 1 = Electrique 2 = piloté par l'amémomčtre |
(From Flight Simulator 2004) Ryan NYP( induction_compass.0=2 ) |
Cette section est utilisée pour définir les caractéristiques des indicateurs d'attitude sur les tableaux de bord. La liste des indicateurs doit ętre numérotée dans l'ordre: 0,1,2, ... n.
| Propriété | Description | Exemples |
|
attitude_indicator.0 to attitude_indicator.n |
Le systčme qui pilote l'indicateur d'attitude. Un parmi : 0 = aucun 1 = gyroscope ŕ vide 2 = gyroscope électrique |
Airbus A321( attitude_indicator.0 = 2 ) Aircreation582SL( attitude_indicator.0=1 ) Beech Baron 58( attitude_indicator.0 = 1 ) DG808S( attitude_indicator.0 = 0 ) Boeing 747-400( attitude_indicator.1 = 1 ) Douglas DC-3( attitude_indicator.1 = 2 ) |
| Propriété | Description | Exemples |
|
altimeter.0 to altimeter.n |
Si ce paramčtre est mis ŕ 1, un altimčtre séparé est installé, qui fonctionnera indépendamment des autres altimčtres, et qui peut se voir appliquer des pannes. |
Airbus A321 Paint2( altimeter.0=1 ) Learjet 45( altimeter.0 = 1 ) Airbus A321 Paint2( altimeter.1=1 ) Learjet 45( altimeter.1 = 1 ) |
Cette section est utilisée pour définir les caractéristiques des indicateurs de virage sur les tableaux de bord. La liste des indicateurs doit ętre numérotée dans l'ordre: 0,1,2, ... n.
| Propriété | Description | Exemples |
| turn_indicator.0 |
Valeurs ŕ deux codes, qui définissent le systčme dont les indicateurs
de virage sont dépendants. La 1e valeur est pour le virage, la 2e est
pour l'inclinaison transversale. Les codes sont : 0 = aucun 1 = gyroscope électrique 2 = gyroscope ŕ vide |
Airbus A321( turn_indicator.0=0,0 ) Aircreation582SL( turn_indicator.0=1,0 ) Beech Baron 58( turn_indicator.0=1,1 ) DeHavilland Beaver DHC2( turn_indicator.0=1 ) |
Les paramčtres suivants définissent le systčme pneumatique de vide de l'avion.
| Propriété | Description | Exemples |
| max_pressure | Pression maximale en PSI. |
Airbus A321( max_pressure=5.15 ) Aircreation582SL( max_pressure=5.000000 ) Boeing 747-400( max_pressure=5.150000 ) DG808S( max_pressure=0 ) |
| vacuum_type |
Type de vide, un parmi : 0 = aucun 1 = pompe du moteur (par défaut) 2 = pneumatique 3 = par venturi. |
Airbus A321( vacuum_type=2 ) Aircreation582SL( vacuum_type=1 ) DG808S( vacuum_type=0 ) |
| electric_backup_pressure | Pression de secours en PSI. |
Aircreation582SL( electric_backup_pressure=0.000000 ) Beech Baron 58( electric_backup_pressure=4.900000 ) Mooney Bravo( electric_backup_pressure=4.9 ) Bell 206B JetRanger( electric_backup_pressure=5.15 ) |
| engine_map | Cette série d'indicateurs dit si les différents moteurs de l'avion sont configurés avec des systčmes ŕ vide. Les indicateurs concernent les moteurs dans l'ordre de gauche ŕ droite, en partant celui le plus ŕ gauche. |
Beech Baron 58( engine_map=1,1 ) Cessna Skyhawk 172SP( engine_map=1 ) |
Les paramčtres suivants définissent le systčme pneumatique de l'avion.
| Propriété | Description | Exemples |
| max_pressure | La pression maximale du systčme pneumatique en PSI. |
Airbus A321( max_pressure=18.000000 ) Aircreation582SL( max_pressure=0.000000 ) Grumman Goose G21A( max_pressure = 21.5 ) Piper Cub( max_pressure=0 ) |
| bleed_air_scalar | Le rapport entre la pression de décharge des moteurs et la pression dans le systčme pneumatique. |
Airbus A321( bleed_air_scalar=1.000000 ) Aircreation582SL( bleed_air_scalar=0.000000 ) Beech Baron 58( bleed_air_scalar=0.00000 ) Cessna Grand Caravan( bleed_air_scalar=0.150000 ) |
Les paramčtres suivants définissent les issues de l'avion :
| Propriété | Description | Exemples |
| number_of_exits | Définit le nombre d'issues ou portes simulées. |
Airbus A321( number_of_exits = 3 ) Aircreation582SL( number_of_exits =1 ) Beech Baron 58( number_of_exits = 1 ) Cessna Grand Caravan( number_of_exits = 2 ) |
|
exit.0 to exit.n |
Cinq valeurs : les taux d'ouverture et fermeture en % par
seconde (oů 1,0 est grand ouvert), les positions longitudinale,
latérale, et verticale depuis le point de référence (en pieds), et le
type d'issue, une parmi : 0 = principale 1 = Cargo 2 = Secours (Emergency) |
Airbus A321( exit.0 = 0.4, 40.50,-6.0, 7.0, 0 ) Boeing 737-800( exit.0 = 0.4, 41.3, -6.0, 4.0, 0 ) Boeing 747-400( exit.0 = 0.4, -30.30, -9.5, 1, 0 ) Bombardier CRJ 700( exit.0 = 0.4, -16.50, -4.5, 0.5, 0 ) Bombardier CRJ 700( exit.1 = 0.4, -74.00, -4.5, 0.5, 1 ) Bombardier CRJ 700( exit.2 = 0.4, -36.50, -2.5, -1.0, 1 ) |
La section effects du fichier aircraft.cfg se réfčre ŕ des effets visuels qui résultent de différents systčmes ou des réactions de l'avion. Un fichier d'effet associé ŕ un mot-clé dans cette section sera utilisé lorsque l'action correspondante est déclenchée. Si aucune information n'est fournie, un fichier d'effet par défaut sera utilisé. Le tableau ci-dessous présente les effets avions actuellement pris en charge, męme si bien sűr tous les effets ne sont pas pris en charge sur tous les avions.
| Propriété | Description | Exemples |
| wake | Effet de sillage, suivi d'un "1" optionnel si l'effet doit ętre exécuté pour une seule itération. Définissez ce nombre ŕ zéro ou laissez-le en blanc (par défaut), pour que l'effet continue aussi longtemps que l'action en question est active. Cette option 1 s'applique ŕ tous les effets dans ce tableau. | Airbus A321( wake=fx_wake ) |
| water | Effet d'eau en cas d'atterrissage, roulage ou décollage. | Airbus A321( water=fx_spray ) |
| dirt | Effet déplacement sur poussičre. | Airbus A321( dirt=fx_tchdrt ) |
| concrete | Effet déplacement sur du béton. |
Airbus A321( concrete=fx_sparks ) DG808S( concrete=fx_tchdwn_s ) |
| touchdown | Effet touchdown (toucher au sol), qui est usuellement suivi d'un "1" optionnel, pour indiquer que l'effet est ŕ exécuter une fois seulement. |
Airbus A321( touchdown=fx_tchdwn, 1) Aircreation582SL( touchdown=fx_tchdwn_s, 1 ) |
| startup | Démarrage d'un moteur. |
Douglas DC-3( startup=fx_engstrt_jenny) Piper Cub( startup=fx_engstrt_cub ) |
| enginefire | Feu d'un moteur. | Bell 206B JetRanger( EngineFire=fx_heliFire) |
| windshield_rain_effect_available | Mettre cet indicateur ŕ 0 supprime l'effet des gouttes d'eau sur le pare-brise. Valeur par défaut : 1. |
(From Flight Simulator 2004) Curtiss Jenny( windshield_rain_effect_available = 0) |
| snowtrack | Effet de trace dans la neige, utilisé au décolage sur la neige. | Maule M7 260C Ski paint1( SnowTrack = fx_snowtrack ) |
| wheelsnowspray | Effet de pulvérisation au décolage sur la neige. | Maule M7 260C Ski paint1( WheelSnowSpray = fx_WheelSnowSpray ) |
| wheelwetspray | Effet de pulvérisation au décolage sur piste mouillée. | Maule M7 260C Ski paint1( WheelWetSpray = fx_WheelWetSpray ) |
Les paramčtres suivants déterminent les fonctions du systčme de pilote automatique de l'avion, y compris le directeur de vol (flight director).
Les contrôleurs de navigation et de taux de descente utilisent un contrôle PID (proportionnel / intégrale / dérivée). Les contrôleurs intégrale et dérivée ont des limites, qui sont l'erreur maximale du paramčtre contrôlé dans lequel ils sont actifs. Il n'est pas nécessaire d'avoir les trois composantes (P, I, ou D) actives. Le réglage ŕ 0 de la constante de la composante respective désactive cette composante, permettant aux contrôleurs PI (proportionnel/intégral) ou PD (proportionnel/dérivée) d'ętre utilisés. Les paramčtres du mode de navigation commencent par <nav_> ou <gs_>.
| Propriété | Description | Exemples |
| autopilot_available | Mettre cet indic. ŕ 1 rend un pilote automatique disponible sur cet avion. |
Airbus A321( autopilot_available=1 ) Aircreation582SL( autopilot_available=0 ) |
| flight_director_available | Mettre cet indic. ŕ 1 rend un directeur de vol disponible sur cet avion. |
Airbus A321( flight_director_available=1 ) Aircreation582SL( flight_director_available=0 ) |
| default_vertical_speed | La vitesse verticale par défaut, en pieds par seconde, que le pilote automatique ordonnera quand un changement important d'altitude sera sélecté. |
Airbus A321( default_vertical_speed=1800 ) Boeing 747-400( default_vertical_speed = 1800.0 ) Beech Baron 58( default_vertical_speed= 700.0 ) Beech King Air 350( default_vertical_speed= 1800.0 ) |
| autothrottle_available | Mettre cet indic. ŕ 1 rend un autothrottle disponible sur cet avion. |
Boeing 747-400( autothrottle_available = 1 ) Beech Baron 58( autothrottle_available= 0 ) |
| autothrottle_arming_required | Mettre cet indic. ŕ 1 imposera que l'autothrottle soit armé avant qu'il soit engagé. Le mettre ŕ 0 permettra ŕ l'autothrottle d'ętre engagé directement. |
Boeing 747-400( autothrottle_arming_required = 1 ) Bombardier CRJ 700( autothrottle_arming_required= 0 ) |
| autothrottle_max_rpm | Fixe le régime moteur maximal, en %, que l'autothrottle essaiera de maintenir. |
Airbus A321( autothrottle_max_rpm = 90 ) Boeing 747-400( autothrottle_max_rpm = 90 ) |
| autothrottle_takeoff_ga | Mettre cet indic. ŕ 1 autorise le décollage et les manśuvres avec l'autothrottle. |
Boeing 747-400( autothrottle_takeoff_ga = 1 ) Bombardier CRJ 700( autothrottle_takeoff_ga= 0 ) |
| default_pitch_mode |
Ceci détermine le mode d'incidence par défaut quand l'autothrottle
est enclenché : 0 = aucun 1 = maintien de l'incidence (angle de montée courant) 2 = maintien de l'altitude (altitude courante) Si aucune valeur n'est fournie, maintien de l'incidence sera pris par défaut |
|
| pitch_takeoff_ga | L'incidence par défaut en mode décollage et manśuvre. |
Beech Baron 58( pitch_takeoff_ga=8.0 ) Douglas DC-3( pitch_takeoff_ga=0.0 ) |
| max_pitch | L'incidence maximale (en degrés) que le pilote automatique commandera en montée ou en descente. |
Airbus A321( max_pitch=10.0 ) |
| max_pitch_acceleration | L'accélération maximale de l'incidence (en degrés/s˛), que le pilote automatique commandera en montée ou en descente. |
Airbus A321( max_pitch_acceleration=1.0 ) |
| max_pitch_velocity_lo_alt | La vitesse de variation maximale de l'incidence (en degrés/s) que le PA commandera quand quand l'altitude est en dessous de celle spécifiée par la variable max_pitch_velocity_lo_alt_breakpoint. |
Airbus A321( max_pitch_velocity_lo_alt=2.0 ) |
| max_pitch_velocity_hi_alt | La vitesse maximale de l'incidence (en degrés/s) que le PA commandera quand quand l'altitude est au dessus de celle spécifiée par la variable max_pitch_velocity_hi_alt_breakpoint. La vitesse de variation maximale est interpolée entre les altitudes hi (haute) et lo (basse) quand la vitesse de montée est entre les seuils hi et lo. |
Airbus A321( max_pitch_velocity_hi_alt=1.5 ) |
| max_pitch_velocity_lo_alt_breakpoint | L'altitude en dessous de laquelle la vitesse de variation maximale d'incidence du PA est limitée par la variable max_pitch_velocity_lo_alt. |
Airbus A321( max_pitch_velocity_lo_alt_breakpoint=20000.0
) |
| max_pitch_velocity_hi_alt_breakpoint | L'altitude au dessus de laquelle la vitesse de variation maximale d'incidence du PA est limitée par la variable max_pitch_velocity_hi_alt. La vitesse de variation maximale est interpolée entre les vitesses de variation de montée hi (haute) et lo (basse) quand l'altitude est entre les seuils hi et lo. |
Airbus A321( max_pitch_velocity_hi_alt_breakpoint=28000.0
) |
| max_bank | L'angle d'inclinaison transversale maximal (en degrés) que le PA commandera ŕ droite ou ŕ gauche. |
Airbus A321( max_bank=25.0 ) Boeing 737-800( max_bank=30,25,20,15,10 ) Bombardier CRJ 700( max_bank=30,15 ) Douglas DC-3( max_bank=25.000000 ) |
| max_bank_acceleration | L'accélération maximale de l'angle d'inclinaison transversale (en degrés/s˛) que le PA commandera ŕ droite ou ŕ gauche. |
Airbus A321( max_bank_acceleration=1.8 ) |
| max_bank_velocity | La vitesse de variation maximale de l'angle d'inclinaison transversale (en degrés/s) que le PA commandera ŕ droite ou ŕ gauche. | Douglas DC-3( max_bank_velocity=3.000000 ) |
| max_throttle_rate | Cette valeur fixe le taux maximal auquel l'autothrottle déplacera la position de la manette des gaz. Dans l'exemple, le taux maximal est réglé ŕ 10% de la plage totale par seconde. | Douglas DC-3( max_throttle_rate=0.100000 ) |
| nav_proportional_control | Constante du contrôleur proportionnel en mode de navigation latéral. |
Airbus A321( nav_proportional_control=12.00 ) Boeing 747-400( nav_proportional_control=16.00 ) Beech Baron 58( nav_proportional_control=9.00 ) Bombardier CRJ 700( nav_proportional_control=11.00 ) |
| nav_integrator_control | Constante du contrôleur intégral en mode de navigation latéral. |
Airbus A321( nav_integrator_control=0.25 ) Boeing 747-400( nav_integrator_control=0.17 ) Bombardier CRJ 700( nav_integrator_control=0.20 ) Douglas DC-3( nav_integrator_control=0.250000 ) |
| nav_derivative_control | Constante du contrôleur dérivé en mode de navigation latéral. |
Airbus A321( nav_derivative_control=0.00 ) Douglas DC-3( nav_derivative_control=0.000000 ) |
| nav_integrator_boundary | La limite, ou erreur maximale, en degrés, pour laquelle la fonction intégrale est active. Dans l'exemple, l'intégrateur est actif quand l'erreur est entre -2,5 and +2,5 degrés au-delŕ de l'axe du signal de navigation. |
Airbus A321( nav_integrator_boundary=2.50 ) |
| nav_derivative_boundary | La limite, ou erreur maximale, en degrés, pour laquelle la fonction dérivée est active. Dans l'exemple, le contrôleur dérivé n'est pas actif, parce que l'erreur maximale a été réglée ŕ 0. |
Airbus A321( nav_derivative_boundary=0.00 ) |
| gs_proportional_control | Constante du contrôleur proportionnel en mode pente d'approche (glideslope). |
Airbus A321( gs_proportional_control=25.0 ) Boeing 747-400( gs_proportional_control = 18.0 ) Beech Baron 58( gs_proportional_control=9.52 ) Douglas DC-3( gs_proportional_control=9.520000 ) |
| gs_integrator_control | Constante du contrôleur intégral en mode pente d'approche (glideslope). |
Airbus A321( gs_integrator_control=0.53 ) Boeing 747-400( gs_integrator_control = 0.33 ) Beech Baron 58( gs_integrator_control=0.26 ) Douglas DC-3( gs_integrator_control=0.260000 ) |
| gs_derivative_control | Constante du contrôleur dérivé en mode pente d'approche (glideslope). |
Boeing 747-400( gs_derivative_control = 0.00 ) |
| gs_integrator_boundary | La limite, ou erreur maximale, en degrés, pour laquelle la fonction intégrale de la pente d'approche (glideslope) est active. Dans l'exemple, l'intégrateur est actif quand l'erreur est entre -0,7 and +0,7 degrés au-delŕ de l'axe du signal de pente d'approche (glideslope). |
Boeing 747-400( gs_integrator_boundary = 0.70 ) |
| gs_derivative_boundary | La limite, ou erreur maximale, en degrés, pour laquelle la fonction dérivée est active. Dans l'exemple, le contrôleur dérivé n'est pas actif, parce que l'erreur maximale a été réglée ŕ 0. |
Boeing 747-400( gs_derivative_boundary = 0.00 ) |
| yaw_damper_gain | Le gain proportionnel de l'erreur de taux de lacet de l'amortisseur de lacet. |
Airbus A321( yaw_damper_gain = 1.0 ) Beech Baron 58( yaw_damper_gain = 0.0 ) |
| direction_indicator | Indique quel systčme d'indicateur de direction de l'avion est référencé par le PA. 0 = le 1er, et c'est pris par défaut. | Douglas DC-3( direction_indicator=1 ) |
| attitude_indicator | Indique quel systčme d'indicateur d'attitude de l'avion est référencé par le PA. 0 = le 1er, et c'est pris par défaut. | Douglas DC-3( attitude_indicator =1 ) |
| default_bank_mode |
Détermine le mode d'inclinaison latérale quand la logique du PA est
active.. 0 = aucun 1 = maintien du niveau des ailes 2 = maintien du cap (cap courant). Si aucune valeur n'est fournie, maintien du niveau des ailes est pris par défaut. |
Douglas DC-3( default_bank_mode=2 ) |
Dans Flight Simulator2002, les indicateurs suivants étaient autorisés pour permettre de configurer l'avion sans modes inclinaison longitudinale ni latérale. Bien que ceci soit toujours supporté, les indicateurs recommandés sont inclus ci-dessus dans les sections vertical et lateral.
| Propriété | Description | Exemples |
| use_no_default_pitch |
Mettre cet indic ŕ1 entraîne que le mode incidence (inclinaison longitudinale)
par défaut soit "Aucun". Ça mettra la variable
default_pitch_mode ŕ zéro, de telle sorte qu'il n'y a pas de
mode inclinaison longitudinale par défaut quand le PA est activé. La méthode préférée est de mettre ŕ 1 default_pitch_mode directement. |
|
| use_no_default_bank |
Mettre cet indic ŕ1 entraîne que le mode inclinaison
latérale par défaut soit "Aucun". Ça mettra la variable
default_bank_mode ŕ zéro, de telle sorte qu'il n'y a pas de
mode inclinaison latérale par défaut quand le PA est activé. La méthode préférée est de mettre ŕ 1 default_bank_mode directement. |
Voir exemples pour default_bank_mode |
Cette section définit les caractéristiques du systčme de carburant, y compris les réservoirs, le type de carburant, et le nombre de sélecteurs de carburant. Le nombre de sélecteurs de carburant est destiné ŕ correspondre au nombre de sélecteurs visuel sur le tableau de bord.
| Propriété | Description | Exemples |
|
center1 center2 center3 leftmain leftaux lefttip rightmain rightaux righttip external1 external2 |
Les positions longitudinale, latérale, et verticale des réservoirs. Ensuite apparaissent les capacités utilisables et non utilisables des réservoirs. |
Boeing 747-400( Center1 = -83.5, 0.0, -7.0, 17164.0, 0.0 ) Bombardier CRJ 700( Center1 = -48.7, 0.0, -4.0, 982.0, 0.0 ) Boeing 747-400( Center2 = -193.5, 0.0, 6.0, 3300.0, 0.0 ) DeHavilland Beaver DHC2( Center3=-10.600000,0.000000,-1.900000,25.000000,0.000000 ) Airbus A321( LeftMain = -3, -19, 0, 1500, 0 ) Beech Baron 58( RightMain = -8.46, 6.45, 0.0, 71.0, 0.0 ) Maule M7 260C( LeftAux = -2.24, -11.4, 2.40, 15.0, 0.00 ) |
| fuel_type |
Type de carburant : un parmi : 1 = Avgas 2 = JetA |
Airbus A321( fuel_type = 2 ) Beech Baron 58( fuel_type = 1 ) |
| number_of_tank_selectors | Nombre de sélecteurs de réservoirs de carburant (au maximum 4, et doit ętre inférieur ou égal au nombre de moteurs.). |
Aircreation582SL( number_of_tank_selectors=1 ) Beech Baron 58( number_of_tank_selectors = 2 ) |
| electric_pump |
Variable logique qui fixe si une pompe électrique de gavage est
disponible. 0 = non (FALSE), 1 = oui (TRUE). |
Airbus A321( electric_pump=0 ) Grumman Goose G21A( electric_pump = 1 ) |
| fuel_dump_rate | Pourcentage de carburant qui peut ętre vidangé par seconde. | Airbus A321( fuel_dump_rate = 0.0167 ) |
| engine_driven_pump | Mis ŕ 0 si la pompe est actionnée par le moteur. (1 par défaut). |
Aircreation582SL( engine_driven_pump=0 ) DeHavilland Beaver DHC2( engine_driven_pump=1 ) |
| manual_pump | Mis ŕ 1 s'il y a une pompe de transfert manuelle. | DeHavilland Beaver DHC2( manual_transfer_pump=1 ) |
| anemometer_pump | Mis ŕ 1 s'il y a une pompe anémométrique. |
(From Flight Simulator 2004) Vickers Vimy Transatlantic( anemometer_pump=1 ) |
Cette section a été ajoutée principalement ŕ titre de référence. Bien que vous puissiez modifier ces valeurs ŕ la main ici, dans le fichier aircraft.cfg, la modification de certaines de ces variables a peu d'effet sur les performances de l'avion, parce que les coefficients aérodynamiques du modčle de vol sont tous situés dans le fichier .air.
| Propriété | Description | Exemples |
| wing_area | Aire totale de la surface supérieure de l'aile entičre, d'un bout ŕ l'autre, en pieds˛. |
Airbus A321( wing_area = 1137.0 ) Aircreation582SL( wing_area= 150.000 ) Boeing 747-400( wing_area = 5825.0 ) Beech Baron 58( wing_area = 199.0 ) |
| wing_span | Envergure (distance horizontale d'un bout de l'aile ŕ l'autre) en pieds. |
Airbus A321( wing_span = 94.75 ) Aircreation582SL( wing_span= 30.000 ) Boeing 747-400( wing_span = 211.4 ) Beech Baron 58( wing_span = 37.8 ) |
| wing_root_chord | Longueur de la corde de l'aile (du bord d'attaque au bord de fuite) ŕ la jonction entre aile et fuselage. En pieds. |
Airbus A321( wing_root_chord = 18.0 ) Aircreation582SL( wing_root_chord= 5.000 ) Boeing 747-400( wing_root_chord = 48.8 ) Beech Baron 58( wing_root_chord = 5.3 ) |
| wing_dihedral | Dičdre. Quand on regarde l'avant d'un avion, c'est l'angle que fait le bord d'attaque de l'aile et une ligne horizontale parallčle au sol. En degrés. |
Airbus A321( wing_dihedral = 6.2 ) Aircreation582SL( wing_dihedral= 7.998 ) Boeing 747-400( wing_dihedral = 7.0 ) Beech Baron 58( wing_dihedral = 6.9 ) |
| wing_incidence | Incidence. Quand on regarde un avion depuis le bout d'une aile, c'est l'angle que fait la corde moyenne de l'aile avec une ligne horizontale parallčle au sol. En degrés. Note : ce paramčtre n'est pas utilisé dans les calculs aérodynamiques en temps réel, parce qu'il est déjŕ pris en compte dans les paramčtres de portance et de traînée. |
Airbus A321( wing_incidence = 1.0 ) Aircreation582SL( wing_incidence= 0.000 ) Boeing 747-400( wing_incidence = 2.0 ) Cessna Skyhawk 172SP( wing_incidence = 1.5 ) |
| wing_twist | Différence entre l'incidence de l'aile ŕ sa racine et l'incidence en bout d'aile, en degrés. Egalement appellée wash-out (gauchissement). |
Airbus A321( wing_twist = -0.5 ) Aircreation582SL( wing_twist= -1.000 ) Boeing 747-400( wing_twist = -1.0 ) Beech King Air 350( wing_twist = -1.5 ) |
| oswald_efficiency_factor | C'est la mesure de l'efficacité aérodynamique de l'aile. Une aile théoriquement parfaite aurait un facteur de 1,0. |
Aircreation582SL( oswald_efficiency_factor= 0.750 ) Boeing 747-400( oswald_efficiency_factor= 0.68 ) Beech Baron 58( oswald_efficiency_factor= 0.7 ) |
| wing_winglets_flag |
Indique si l'avion possčde des winglets (ailettes) ; 0 = FALSE (non), 1 = TRUE (oui). |
Aircreation582SL( wing_winglets_flag= 0 ) Boeing 747-400( wing_winglets_flag = 1 ) |
| wing_sweep | Flčche. Quand on regarde l'avion de haut en bas, c'est l'angle que fait le bord d'attaque avec une ligne horizontale perpendiculaire au fuselage. En degrés. |
Airbus A321( wing_sweep = 25.0 ) Boeing 747-400( wing_sweep = 37.5 ) Beech Baron 58( wing_sweep = 0.0 ) |
| wing_pos_apex_lon | Distance longitudinale entre le carénage d'emplanture de l'aile (mesuré dans l'axe de l'avion) et une référence définie, en pieds. Positive vers l'avant. |
Airbus A321( wing_pos_apex_lon = 8.0 ) Aircreation582SL( wing_pos_apex_lon= 0.000 ) Boeing 747-400( wing_pos_apex_lon = -58.2 ) Beech Baron 58( wing_pos_apex_lon = -5.6 ) |
| wing_pos_apex_vert | Distance verticale entre le carénage d'emplanture de l'aile (mesuré dans l'axe de l'avion) et une référence définie, en pieds. Positive vers le haut. |
Boeing 747-400( wing_pos_apex_vert = 0 ) Bombardier CRJ 700( wing_pos_apex_vert = -3.6 ) |
| htail_area | Aire de la surface supérieure entičre de l'empennage horizontal (d'un bout ŕ l'autre). En pieds˛. |
Airbus A321( htail_area = 338.0 ) Aircreation582SL( htail_area= 28.000 ) Boeing 747-400( htail_area = 1470 ) Beech Baron 58( htail_area = 60.0 ) |
| htail_span | Envergure de l'empennage horizontal (d'un bout ŕ l'autre). En pieds˛. |
Airbus A321( htail_span = 41.7 ) Aircreation582SL( htail_span= 7.917 ) Boeing 747-400( htail_span = 72.8 ) Beech Baron 58( htail_span = 15.9 ) |
| htail_pos_lon | Distance longitudinale entre le carénage d'emplanture de la queue (mesuré dans l'axe de l'avion) et une référence définie, en pieds. Positive vers l'avant. |
Airbus A321( htail_pos_lon = -35.0 ) Aircreation582SL( htail_pos_lon= -11.417 ) Boeing 747-400( htail_pos_lon = -210.0 ) Beech Baron 58( htail_pos_lon = -20.1 ) |
| htail_pos_vert | Distance verticale entre le carénage d'emplanture de l'empennage horizontal (mesurédans l'axe de l'avion) et une référence définie, en pieds. Positive vers le haut. |
Airbus A321( htail_pos_vert = 0.0 ) Bombardier CRJ 700( htail_pos_vert = 12.7 ) DeHavilland Beaver DHC2( htail_pos_vert = 0.9 ) |
| htail_incidence | Incidence. Quand on regarde un avion depuis le bout de l'empennage horizontal, c'est l'angle que fait la corde moyenne de l'aile avec une ligne horizontale parallčle au sol. En degrés. |
Aircreation582SL( htail_incidence= 0.000 ) Beech Baron 58( htail_incidence = 0.5 ) Bombardier CRJ 700( htail_incidence = 4.0 ) |
| htail_sweep | Flčche. Quand on regarde l'avion de haut en bas, c'est l'angle que fait le bord d'attaque de l'empennage horizontal avec une ligne horizontale perpendiculaire au fuselage. En degrés. |
Airbus A321( htail_sweep = 30.0 ) Boeing 747-400( htail_sweep = 37.5 ) Beech Baron 58( htail_sweep = 0.0 ) |
| vtail_area | Aire totale d'une face de l'empennage vertical. En pieds˛. |
Airbus A321( vtail_area = 224.0 ) Aircreation582SL( vtail_area= 7.000 ) Boeing 747-400( vtail_area = 1060 ) Beech Baron 58( vtail_area = 88.0 ) |
| vtail_span | Hauteur de la queue verticale. Distance verticale entre l'intersection queue-fuselage et le bout haut de la queue. En pieds. |
Airbus A321( vtail_span = 20.0 ) Aircreation582SL( vtail_span= 3.017 ) Boeing 747-400( vtail_span = 37.1 ) Beech Baron 58( vtail_span = 10.7 ) |
| vtail_sweep | Flčche. Quand on regarde l'avion par le côté, c'est l'angle que fait le bord d'attaque de l'empennage vertical avec une ligne verticale perpendiculaire au fuselage. En degrés. |
Airbus A321( vtail_sweep = 35.0 ) Boeing 747-400( vtail_sweep = 45.0 ) Beech Baron 58( vtail_sweep = 0.0 ) |
| vtail_pos_lon | Distance longitudinale entre le carénage d'emplanture de l'empennage vertical (measurée dans l'axe de l'avion) et une référence définie, en pieds. Positive vers l'avant |
Airbus A321( vtail_pos_lon = -35.8 ) Aircreation582SL( vtail_pos_lon= -11.417 ) Boeing 747-400( vtail_pos_lon = -198.5 ) Beech Baron 58( vtail_pos_lon = -22.9 ) |
| vtail_pos_vert | Distance verticale entre le carénage d'emplanture de l'empennage vertical (measurée dans l'axe de l'avion) et une référence définie, en pieds. Positive vers le haut. |
Airbus A321( vtail_pos_vert = 5.8 ) Aircreation582SL( vtail_pos_vert= 1.500 ) Boeing 747-400( vtail_pos_vert = 26.1 ) Beech Baron 58( vtail_pos_vert = 3.1 ) |
| elevator_area | Aire totale de la surface supérieure de la gouverne de profondeur (d'un bout ŕ l'autre) en pieds˛. |
Airbus A321( elevator_area = 70.5 ) Aircreation582SL( elevator_area= 12.040 ) Boeing 747-400( elevator_area = 327 ) Beech Baron 58( elevator_area = 20.0 ) |
| aileron_area | Aire totale de la surface supérieure des ailerons sur l'aile, en pieds˛. |
Airbus A321( aileron_area = 26.9 ) Aircreation582SL( aileron_area= 15.000 ) Boeing 747-400( aileron_area = 225 ) Beech Baron 58( aileron_area = 11.3 ) |
| rudder_area | Aire totale de la surface latérale du gouvernail, en pieds˛. |
Airbus A321( rudder_area = 56.2 ) Aircreation582SL( rudder_area= 2.450 ) Boeing 747-400( rudder_area = 230 ) Beech Baron 58( rudder_area = 10.5 ) |
| elevator_up_limit | Angle limite de la gouverne de profondeur quand elle est ŕ fond vers le haut (degrés). |
Airbus A321( elevator_up_limit = 22.5 ) Aircreation582SL( elevator_up_limit= 27.502 ) Boeing 747-400( elevator_up_limit = 25 ) Beech Baron 58( elevator_up_limit = 17.0 ) |
| elevator_down_limit | Angle limite de la gouverne de profondeur quand elle est ŕ fond vers le bas (degrés). |
Airbus A321( elevator_down_limit = 19.5 ) Aircreation582SL( elevator_down_limit= 20.626 ) Boeing 747-400( elevator_down_limit = 15 ) Beech Baron 58( elevator_down_limit = 15.5 ) |
| aileron_up_limit | Angle limite de l'aileron quand il est ŕ fond vers le haut (degrés). |
Airbus A321( aileron_up_limit = 20.0 ) Aircreation582SL( aileron_up_limit= 19.481 ) Boeing 747-400( aileron_up_limit = 25 ) Beech Baron 58( aileron_up_limit = 18.0 ) |
| aileron_down_limit | Angle limite de l'aileron quand il est ŕ fond vers le bas (degrés). |
Airbus A321( aileron_down_limit = 20.0 ) Aircreation582SL( aileron_down_limit= 14.897 ) Boeing 747-400( aileron_down_limit = 15 ) Beech Baron 58( aileron_down_limit = 18.0 ) |
| rudder_limit | Angle limite du gouvernail (degrés). |
Airbus A321( rudder_limit = 26.0 ) Aircreation582SL( rudder_limit= 23.491 ) Boeing 747-400( rudder_limit = 31.5 ) Beech Baron 58( rudder_limit = 30.0 ) |
| elevator_trim_limit | Angle limite du compensateur (trim) de la gouverne de profondeur (degrés). |
Airbus A321( elevator_trim_limit = 20.0 ) Aircreation582SL( elevator_trim_limit= 20.000 ) Boeing 747-400( elevator_trim_limit = 20 ) Beech Baron 58( elevator_trim_limit = 15.0 ) |
| spoiler_limit | Angle limite des destructeurs de portance (spoilers) d'aile en degrés. Fixé ŕ 0 s'il n'y a pas de spoiler sur l'avion. |
Airbus A321( spoiler_limit = 60.0 ) Aircreation582SL( spoiler_limit= 59.989 ) Boeing 747-400( spoiler_limit = 45 ) Beech Baron 58( spoiler_limit = 0.0 ) |
| spoiler_extension_time | Durée de sortie des spoilers, en secondes. |
Airbus A321( spoiler_extension_time = 2.0 ) Aircreation582SL( spoiler_extension_time=5.000000 ) Cessna Grand Caravan( spoiler_extension_time = 0.2 ) DG808S( spoiler_extension_time = 1.0 ) |
| spoilerons_available | Valeur logique indiquant si les spoilers se comportent aussi comme des spoilerons pour le contrôle de roulis (s'ils sont disponibles) : 0 = FALSE (non), 1 = TRUE (oui). |
Airbus A321( spoilerons_available = 1 ) Aircreation582SL( spoilerons_available= 0 ) Beech Baron 58( spoilerons_available = 0 ) |
| aileron_to_spoileron_gain | Si les spoilerons sont disponibles, cette valeur est la constante utilisée pour déterminer la déflexion du spoiler par déflexion d'aileron. |
Airbus A321( aileron_to_spoileron_gain = 3 ) Beech Baron 58( aileron_to_spoileron_gain = 0 ) Bombardier CRJ 700( aileron_to_spoileron_gain = 4.6 ) |
| min_ailerons_for_spoilerons | Indique ŕ quelle déflexion de l'aileron les spoilers deviennent actifs pour le contrôle du roulis. En degrés. |
Airbus A321( min_ailerons_for_spoilerons = 10 ) Beech Baron 58( min_ailerons_for_spoilerons = 0 ) Bombardier CRJ 700( min_ailerons_for_spoilerons = 5 ) |
| min_flaps_for_spoilerons | Indique ŕ quelle position minimale du levier de volets (flaps) les spoilerons deviennent actifs. | Bombardier CRJ 700( min_flaps_for_spoilerons= 0.0 ) |
| auto_spoiler_available | Mis ŕ 1 si l'auto-spoiler is disponible. |
Airbus A321( auto_spoiler_available = 1 ) Beech Baron 58( auto_spoiler_available = 0 ) |
| positive_g_limit_flaps_up | Indique la tolérance en charge aux g (volets rentrés). |
Airbus A321( positive_g_limit_flaps_up = 4.0 ) Beech Baron 58( positive_g_limit_flaps_up = 3.0 ) DG808S( positive_g_limit_flaps_up = 5.5 ) |
| positive_g_limit_flaps_down | Indique la tolérance de conception en charge aux g (volets sortis). |
Airbus A321( positive_g_limit_flaps_down= 3.0 ) Aircreation582SL( positive_g_limit_flaps_down=2.000000 ) DG808S( positive_g_limit_flaps_down= 5.5 ) |
| negative_g_limit_flaps_up | Indique la tolérance de conception en charge aux g (négative, volets sortis). |
Airbus A321( negative_g_limit_flaps_up = -3.0 ) Beech Baron 58( negative_g_limit_flaps_up = -2.0 ) Cessna Skyhawk 172SP( negative_g_limit_flaps_up = -1.5 ) |
| negative_g_limit_flaps_down | Indique la tolérance de conception en charge aux g (négative, volets rentrés). |
Airbus A321( negative_g_limit_flaps_down= -2.0 ) Cessna Skyhawk 172SP( negative_g_limit_flaps_down= -1.5 ) DG808S( negative_g_limit_flaps_down= -3.5 ) |
| load_safety_factor | Facteur de sécurité de conception pour les g en charge. | Airbus A321( load_safety_factor = 1.5 ) |
| fly_by_wire | Systčme de commandes électriques (Fly by wire) disponible. | Airbus A321 (fly_by_wire = 1) |
| spoiler_handle_available | Configure l'avion avec une commande manuelle des spoilers . 0 = FALSE (non dispo.), 1 = TRUE (dispo). | Cessna Grand Caravan( spoiler_handle_available = 0 ) |
| flap_to_aileron_scale | Flaperons - déflexion des ailerons due ŕ la déflexion des volets. |
DeHavilland Beaver DHC2( flap_to_aileron_scale = 0.3 ) DG808S( flap_to_aileron_scale = 0.5 ) |
| aileron_to_rudder_scale | Associe le gouvernail ŕ la commande des ailerons. |
(From Flight Simulator 2004) Wright Flyer( aileron_to_rudder_scale = 0.4 ) |
Les valeurs données dans cette section le sont ŕ titre de référence, parce que les performances de l'avion se trouvent dans le fichier .air.
| Propriété | Description | Exemples |
| flaps_up_stall_speed | Vitesse de décrochagede l'avion en configuration lisse (volets rentrés), au niveau de la mer standard (NDT : dans le texte anglais : KTAS, qu'on ne retrouve dans aucune documentation. C'est donc vraisemblablement une faute de frappe, pour KIAS : noeuds indiqués au Badin par rapport ŕ l'air). |
Airbus A321( flaps_up_stall_speed = 142.0 ) Aircreation582SL( flaps_up_stall_speed= 24.000 ) Boeing 747-400( flaps_up_stall_speed = 140.0 ) Beech Baron 58( flaps_up_stall_speed = 84.0 ) |
| full_flaps_stall_speed | Vitesse de décrochagede l'avion en configuration non lisse (volets complčtement sortis), au niveau de la mer standard. (NDT : dans le texte anglais : KTAS, qu'on ne retrouve dans aucune documentation. C'est donc vraisemblablement une faute de frappe, pour KIAS : noeuds indiqués au Badin par rapport ŕ l'air). |
Airbus A321( full_flaps_stall_speed = 113.0 ) Aircreation582SL( full_flaps_stall_speed= 24.000 ) Boeing 747-400( full_flaps_stall_speed = 112.0 ) Beech Baron 58( full_flaps_stall_speed = 75.0 ) |
| cruise_speed | Vitesse de croisičre typique de l'avion configuration lisse (volets rentrés) ŕ l'altitude de croisičre typique. (NDT : dans le texte anglais : KTAS, qu'on ne retrouve dans aucune documentation. C'est donc vraisemblablement une faute de frappe, pour KIAS : noeuds indiqués au Badin par rapport ŕ l'air). |
Airbus A321( cruise_speed = 477.0 ) Aircreation582SL( cruise_speed= 84.560 ) Boeing 747-400( cruise_speed = 505.0 ) Beech Baron 58( cruise_speed = 180.0 ) |
| max_mach | Nombre de Mach maximal de l'avion ŕ la conception. S'applique généralement aux avions ŕ turbine. |
Airbus A321( max_mach = 0.82 ) Boeing 747-400( max_mach = 0.92 ) Beech King Air 350( max_mach = 0.58 ) Bombardier CRJ 700( max_mach = 0.83 ) |
| max_indicated_speed | Vitesse air indiquée maximale ŕ la conception. Egalement appelée Never Exceed Speed ou ligne rouge (Red Line) de l'avion. (vitesse air indiquée en noeuds). |
Airbus A321( max_indicated_speed = 340 ) Aircreation582SL( max_indicated_speed=65.000000 ) Boeing 747-400( max_indicated_speed = 365.0 ) Beech Baron 58( max_indicated_speed = 223 ) |
Comme indiqué dans les tableaux ci-dessous, les paramčtres de cette section d'un fichier aircraft.cfg définissent les forces générées par l'avion si l'utilisateur utilise un joystick ŕ retour de force.
Ces paramčtres définissent la force du vibreur du joystick ou du yoke, lorsqu'on pilote un avion équipé d'un vibreur de manche (comme les 45 Learjet).
Ces paramčtres définissent les forces simulées produites par la traînée de la cellule et du train sur le joystick ou le yoke, quand le train d'atterrissage avant et principal est relevé ou abaissé. Dans les avions ŕ train fixe cet effet ne se fera pas sentir, car, par définition, le train d'atterrissage ne bouge pas. Des avions différents peuvent avoir des géométries de train différentes qui se traduisent par des début et fin de cycle ŕ des moments différents. Les écarts de synchronisation sont brefs, habituellement moins d'une seconde entre le moment oů chaque élément du train commence et finit son cycle.
Ces paramčtres définissent collectivement une force composite qui simule les forces ressenties aux commandes d'un avion au sol lorsque l'avion se déplace sur une surface inégale. Les paramčtres sont divisés en deux sous-groupes (numérotés 1 et 2), et définissent le comportement de deux forces distinctes. La combinaison des deux forces permet de définir une force composite qui est transférée au joystick ou au yoke. Les deux forces sont ŕ la fois les forces sinusoďdales périodiques, avec des fréquences déterminées par l'équation linéaire suivante:
fréquence = (ground_bumps_slope aircraft_ground_speed) + ground_bumps_intercept
Les paramčtres ground_bumps_magnitude définissent la grandeur de la force. Les paramčtres ground_bumps_angle définissent la direction de la force.
Ces paramčtres définissent les forces simulées ressenties dans le joystick ou le yoke lors d'un écrasement de l'avion. Les paramčtres sont divisés en deux sous-groupes (numérotés 1 et 2), et définissent les comportements de deux forces induites distinctes par le crash. La premičre force est une force constante qui dure 0,5 seconde. Aprčs 0,5 seconde, elle s'arręte et la deuxičme force commence. La deuxičme force est une onde carrée périodique, son amplitude diminuant de façon linéaire jusqu'ŕ 0.
| Propriété | Description | Exemples |
| gear_bump_nose_magnitude | Nombre entier entre 0 et 10000. |
Airbus A321( gear_bump_nose_magnitude=3000 ) Aircreation582SL( gear_bump_nose_magnitude=6000 ) |
| gear_bump_nose_direction | Nombre entier entre 0 et 35999 degrés. | Airbus A321( gear_bump_nose_direction=18000 ) |
| gear_bump_nose_duration | Nombre entier, microsecondes. | Airbus A321( gear_bump_nose_duration=250000 ) |
| gear_bump_left_magnitude | Nombre entier entre 0 et 10000. |
Airbus A321( gear_bump_left_magnitude=2700 ) Aircreation582SL( gear_bump_left_magnitude=6000 ) |
| gear_bump_left_direction | Nombre entier entre 0 et 35999 degrés. |
Airbus A321( gear_bump_left_direction=35500 ) Beech Baron 58( gear_bump_left_direction=9000 ) |
| gear_bump_left_duration | Nombre entier, microsecondes. | Airbus A321( gear_bump_left_duration=250000 ) |
| gear_bump_right_magnitude | Nombre entier entre 0 et 10000. |
Airbus A321( gear_bump_right_magnitude=2700 ) Aircreation582SL( gear_bump_right_magnitude=6000 ) |
| gear_bump_right_direction | Nombre entier entre 0 et 35999 degrés. |
Airbus A321( gear_bump_right_direction=00500 ) Beech Baron 58( gear_bump_right_direction=27000 ) |
| gear_bump_right_duration | Nombre entier, en microsecondes. | Airbus A321( gear_bump_right_duration=250000 ) |
| ground_bumps_magnitude1 | Nombre entier entre 0 et 10000. |
Airbus A321( ground_bumps_magnitude1=1300 ) Aircreation582SL( ground_bumps_magnitude1=3250 ) DG808S( ground_bumps_magnitude1=2500 ) Douglas DC-3( ground_bumps_magnitude1=2600 ) |
| ground_bumps_angle1 | Nombre entier entre 0 et 35999 degrés. | Aircreation582SL( ground_bumps_angle1=8900 ) |
| ground_bumps_intercept1 | Nombre en virgule flottante, entre 0 et 1 000 000 cycles. pInteger fromer second. |
Airbus A321( ground_bumps_intercept1=3.0 ) Aircreation582SL( ground_bumps_intercept1=5.0 ) DG808S( ground_bumps_intercept1=10.0 ) Extra 300S( ground_bumps_intercept1=4.0 ) |
| ground_bumps_slope1 | Nombre en virgule flottante, entre 0 et 1 000 000 cycles. pInteger fromer second. |
Airbus A321( ground_bumps_slope1=0.20 ) Aircreation582SL( ground_bumps_slope1=0.48 ) DG808S( ground_bumps_slope1=0.300 ) Douglas DC-3( ground_bumps_slope1=0.6 ) |
| ground_bumps_magnitude2 | Nombre entier entre 0 et 10000. |
Airbus A321( ground_bumps_magnitude2=200 ) Aircreation582SL( ground_bumps_magnitude2=750 ) DG808S( ground_bumps_magnitude2=350 ) Douglas DC-3( ground_bumps_magnitude2=1200 ) |
| ground_bumps_angle2 | Nombre entier entre 0 et 35999 degrés. |
Airbus A321( ground_bumps_angle2=09100 ) Aircreation582SL( ground_bumps_angle2=9100 ) |
| ground_bumps_intercept2 | Nombre en virgule flottante, entre 0 et 1 000 000 cycles. pInteger fromer second. |
Airbus A321( ground_bumps_intercept2=1.075 ) Aircreation582SL( ground_bumps_intercept2=0.075 ) Bombardier CRJ 700( ground_bumps_intercept2 =1.075 ) Douglas DC-3( ground_bumps_intercept2=0.085 ) |
| ground_bumps_slope2 | Nombre en virgule flottante, entre 0 et 1 000 000 cycles. pInteger fromer second. |
Airbus A321( ground_bumps_slope2=0.035 ) Aircreation582SL( ground_bumps_slope2=1.0 ) Douglas DC-3( ground_bumps_slope2=0.65 ) Extra 300S( ground_bumps_slope2=0.7 ) |
| crash_magnitude1 | Fixe l'amplitude de la 1e force, de 0 ŕ 10000. | Airbus A321( crash_magnitude1=10000 ) |
| crash_direction1 | Fixe la direction d'oů la 1e force est resentie, de 0 ŕ 35999. | Airbus A321( crash_direction1=01000 ) |
| crash_magnitude2 | Fixe l'amplitude initiale de la 2e force, de 0 ŕ 10000. | Airbus A321( crash_magnitude2=10000 ) |
| crash_direction2 | Fixe la direction d'oů la 2e force est resentie, de 0 ŕ 35999. | Airbus A321( crash_direction2=9000 ) |
| crash_period2 | Détermine la fréquence (fréquence = 1/période) de la 2e force du crash, en microsecondes. | Airbus A321( crash_period2=75000 ) |
| crash_duration2 | Fixe la durée de la 2e force du crash, en microsecondes. |
Airbus A321( crash_duration2=2500000 ) Douglas DC-3( crash_duration2=3500000 ) |
| stick_shaker_magnitude | Nombre entier entre 0 et 10000. | Beech Baron 58( stick_shaker_magnitude=5000 ) |
| stick_shaker_direction | Nombre entier entre 0 et 35999 degrés. | Beech Baron 58( stick_shaker_direction=0 ) |
| stick_shaker_period | En microsecondes. | Beech Baron 58( stick_shaker_period=111111 ) |
Cette section définit le systčme d'alarme de décrochage de l'avion.
| Propriété | Description | Exemples |
| type |
Cet indic. détermine le type de systčme de détection de décrochage,
un parmi : 0 = aucun 1 = Suction 2 = Electrique |
Airbus A321( type=2 ) Aircreation582SL( type=0 ) Cessna Skyhawk 172SP( type=1 ) |
| stick_shaker | Mis ŕ 1 si l'avion a un manche vibrant. |
Airbus A321( stick_shaker=1 ) Aircreation582SL( stick_shaker=0 ) |
Cette section définit le system de dégivrage de l'avion.
| Propriété | Description | Exemples |
| structural_deice_type |
Type of dégivrage, un parmi : 0 = aucun 1 = bord d'attaque chauffant 2 = Bleed Air Boots 3 = Eng Pump Boots. |
Airbus A321( structural_deice_type=1 ) Aircreation582SL( structural_deice_type=0 ) Beech Baron 58( structural_deice_type=3 ) Beech King Air 350( structural_deice_type=2 ) |
La puissance d'un moteur ŕ piston peut ętre déterminée par une série d'équations qui représentent le cycle d'Otto d'un moteur ŕ piston ŕ quatre temps, multiplié par le nombre de pistons disponibles. Cette section contient toutes les informations dont Flight Simulator a besoin pour déterminer quelle puissance les moteurs sont capables de produire. La puissance peut également ętre mise ŕ l'échelle ŕ partir de valeurs générées pour les moteurs ŕ piston grâce ŕ la valeur "power_scalar".
| Propriété | Description | Exemples |
| max_rpm_mechanical_efficiency_scalar |
Facteur qui peut ętre modifié pour ajuster le rendement mécanique du moteur au régime maximal (tr/min). Augmenter cette valeur augmente le rendement mécanique, le diminuer abaisse le rendement mécanique. |
Beech Baron 58( max_rpm_mechanical_efficiency_scalar= 1.0 ) |
| idle_rpm_mechanical_efficiency_scalar |
Facteur qui peut ętre modifié pour ajuster le rendement mécanique du moteur au ralenti. Augmenter cette valeur augmente le rendement mécanique, le diminuer abaisse le rendement mécanique. |
Beech Baron 58( idle_rpm_mechanical_efficiency_scalar= 1.0 ) |
| max_rpm_friction_scalar |
Facteur qui peut ętre modifié pour ajuster les frottements internes du moteur au régime maximal. Augmenter cette valeur augmente le les frottements, le diminuer les abaisse. |
Aircreation582SL( max_rpm_friction_scalar=1.000 ) |
| idle_rpm_friction_scalar |
Facteur qui peut ętre modifié pour ajuster les frottements internes du moteur au ralenti. Augmenter cette valeur augmente le les frottements, le diminuer les abaisse. Peut ętre utilisé pour ajuster le régime de ralenti. |
Aircreation582SL( idle_rpm_friction_scalar=1.000 ) |
| cylinder_displacement | Cylindrée unitaire en pieds cubiques (cubic inches). |
Aircreation582SL( cylinder_displacement= 55.000 ) Beech Baron 58( cylinder_displacement= 91.7 ) Cessna Skyhawk 172SP( cylinder_displacement= 90.0 ) DeHavilland Beaver DHC2( cylinder_displacement= 109.4 ) |
| two_stroke_cycle | Moteur ŕ deux-temps (1=oui, 0=non) | Aircreation582SL Blue( two_stroke_cycle = 1 ) |
| compression_ratio | Taux de compression de chaque cylindre. |
Aircreation582SL( compression_ratio= 11.500 ) Beech Baron 58( compression_ratio= 8.0 ) Cessna Skyhawk 172SP( compression_ratio= 8.5 ) DeHavilland Beaver DHC2( compression_ratio= 6.0 ) |
| number_of_cylinders | Nombre entier. Nombre de cylindres par moteur. |
Aircreation582SL( number_of_cylinders= 2 ) Beech Baron 58( number_of_cylinders= 6 ) Cessna Skyhawk 172SP( number_of_cylinders=4 ) DeHavilland Beaver DHC2( number_of_cylinders=9 ) |
| max_rated_rpm | Régime maximal du moteur (red line) (t/min). |
Aircreation582SL( max_rated_rpm= 5500.000 ) Beech Baron 58( max_rated_rpm= 2700.0 ) Cessna Skyhawk 172SP( max_rated_rpm= 2700 ) DeHavilland Beaver DHC2( max_rated_rpm= 2300 ) |
| max_rated_hp | Puissance maximale au frein fournie par le moteur (en hp). |
Aircreation582SL( max_rated_hp= 53.600 ) Beech Baron 58( max_rated_hp= 300.0 ) Cessna Skyhawk 172SP( max_rated_hp= 180 ) DeHavilland Beaver DHC2( max_rated_hp= 450 ) |
| fuel_metering_type |
Nombre entier indiquant le type d'alimentation en carburant.
Un parmi : 0 = injection, 1 = carburateur ŕ gravité, 2 = carburateur pour acrobatie. |
Aircreation582SL( fuel_metering_type= 1 ) Beech Baron 58( fuel_metering_type= 0 ) DeHavilland Beaver DHC2( fuel_metering_type = 1 ) |
| cooling_type |
Nombre entier indiquant la méthode de refroidissement du
moteur. Un parmi : 0 = air 1 = liquide. |
Aircreation582SL( cooling_type= 1 ) Beech Baron 58( cooling_type= 0 ) |
| normalized_starter_torque |
Cette valeur peut ętre modifiée pour augmenter ou diminuer le couple fourni par le démarreur pour faire tourner l'hélice. Augmentez cette valeur pour augmenter le couple, la diminuer pour l'abaisser. |
Beech Baron 58( normalized_starter_torque= 0.3 ) |
| turbocharged | Valeur logique indiquant si me moteur est turbocompressé. 0 = FALSE (non), 1 = TRUE (oui). |
Aircreation582SL( turbocharged= 0 ) DeHavilland Beaver DHC2( turbocharged= 1 ) |
| max_design_mp |
Si un turbocompresseur est présent, cette valeur indique la pression maximale spécifiée fournie par le turbocompresseur (pouces de mercure, inHg). |
Beech Baron 58( max_design_mp= 0.0 ) DeHavilland Beaver DHC2( max_design_mp= 36.5 ) |
| min_design_mp |
Si un turbocompresseur est présent, cette valeur indique la pression minimale spécifiée fournie par le turbocompresseur (pouces de mercure, inHg). |
Beech Baron 58( min_design_mp= 1.0 ) DeHavilland Beaver DHC2( min_design_mp= 10 ) |
| critical_altitude |
Altitude ŕ laquelle le turbocompresseur, s'il existe, fournira la pression maximale spécifiée dans le collecteur d'admission (en pieds). |
Beech Baron 58( critical_altitude= 0.0 ) DeHavilland Beaver DHC2( critical_altitude= 5000 ) |
| emergency_boost_type |
Nombre entier indiquant le type de suralimentation d'urgence
disponible. Un parmi : 0 = aucun 1 = injection d'eau 2 = injection de méthanol/eau 3 = puissance d'urgence de guerre (War Emergency Power), typiquement utilisée dans les avions de combat de la 2e guerre mondiale. |
Aircreation582SL( emergency_boost_type= 0 ) |
| emergency_boost_mp_offset | Pression supplémentaire d'admission fournie par la suralimentation d'urgence, si disponible. | Aircreation582SL( emergency_boost_mp_offset= 0.000 ) |
| emergency_boost_gain_offset | Multiplicateur de la pression d'admission due ŕ la suralimentation d'urgence. | Aircreation582SL( emergency_boost_gain_offset= 0.000 ) |
| fuel_air_auto_mixture |
Valeur logique indiqant si un mélange automatique air-carburant
est disponible. 0 = FALSE (non), 1 = TRUE (oui). |
Aircreation582SL( fuel_air_auto_mixture= 0 ) |
| auto_ignition |
Valeur logique indiqant si un allumage automatique est disponible.
0 = FALSE (non), 1 = TRUE (oui). |
Aircreation582SL( auto_ignition= 0 ) |
| power_scalar |
Changer cette valeur influe sur la puissance délivrée par le moteur ŕ l'arbre de l'hélice. |
Beech Baron 58( power_scalar = 1.0 ) |
| bestpowerspecificfuelconsumption | Consommation spécifique de carburant (SFC) pour la richesse optimale. | Cessna Skyhawk 172SP Paint1( BestPowerSpecificFuelConsumption=0.49 ) |
| magneto_order_left_right_both | Fixe l'ordre sur la direction du commutateur de magnéto. | Douglas DC-3( magneto_order_left_right_both = 1 ) |
| number_of_magnetos | Nombre de magnétos. |
(From Flight Simulator 2004) Curtiss Jenny( number_of_magnetos = 1 ) |
La poussée générée par une hélice donnée est fonction de la puissance délivrée par l'arbre d'hélice, du régime en t/min, de l'angle de la pale, de la vitesse de l'avion, et de la densité de l'air ambiant.
| Propriété | Description | Exemples |
| propeller_type |
Nombre entier qui identifie le type d'hélice de l'avion.
Un parmi : 0 = régime constant 1 = pas fixe. |
Aircreation582SL( propeller_type= 1 ) Beech Baron 58( propeller_type= 0 ) Beech King Air 350( propeller_type = 0 ) |
| propeller_diameter | Diamčtre des pales de l'hélice, en pieds. |
Aircreation582SL( propeller_diameter= 5.000 ) Beech Baron 58( propeller_diameter= 6.4 ) Beech King Air 350( propeller_diameter = 8.8 ) Cessna Skyhawk 172SP( propeller_diameter= 6.3 ) |
| propeller_blades | Nombre entier indquant le nombre de pales de l'hélice (2, 3 ou 4). |
Aircreation582SL( propeller_blades= 2 ) Beech Baron 58( propeller_blades= 3 ) Beech King Air 350( propeller_blades = 4 ) Cessna Grand Caravan( propeller_blades = 3 ) |
| propeller_moi | Le moment d'inertie de l'hélice, en kilogramme.pied˛. |
Aircreation582SL( propeller_moi= 3.000 ) Beech Baron 58( propeller_moi= 6.9 ) Beech King Air 350( propeller_moi = 24 ) Cessna Skyhawk 172SP( propeller_moi= 5.0 ) |
| beta_max | L'angle de pale maximal pour une hélice ŕ régime constant (degrés). Non utilisé si le pas est fixe. |
Aircreation582SL( beta_max= 0 ) Beech Baron 58( beta_max= 45.0 ) Beech King Air 350( beta_max = 45 ) DeHavilland Beaver DHC2( beta_max= 24.0 ) |
| beta_min | L'angle de pale minimal pour une hélice ŕ régime constant (degrés). Non utilisé si le pas est fixe. |
Aircreation582SL( beta_min= 0 ) Beech Baron 58( beta_min= 15.2 ) Beech King Air 350( beta_min = 15.2 ) Cessna Grand Caravan( beta_min = 15.6 ) |
| min_gov_rpm | Le régime minimal contrôlé par le régulateur de vitesse pour une hélice ŕ régime constant |
Aircreation582SL( min_gov_rpm= 0 ) Beech Baron 58( min_gov_rpm= 1100.0 ) Beech King Air 350( min_gov_rpm = 25520 ) DeHavilland Beaver DHC2( min_gov_rpm= 800 ) |
| prop_tc | Constante de temps pour l'hélice. |
Aircreation582SL( prop_tc= 0.100 ) Beech Baron 58( prop_tc= 0.1 ) Beech King Air 350( prop_tc = 0.004 ) Cessna Skyhawk 172SP( prop_tc= 0 ) |
| gear_reduction_ratio | Rapport de réduction entre le régime moteur et celui de l'hélice. |
Aircreation582SL( gear_reduction_ratio= 1.000 ) Beech Baron 58( gear_reduction_ratio= 1.0 ) Beech King Air 350( gear_reduction_ratio = 17.6 ) Cessna Grand Caravan( gear_reduction_ratio = 17.4 ) |
| fixed_pitch_beta | Angle de pale pour une hélice ŕ pas fixe (degrés). Non utilisé sur une hélice ŕ régime constant. |
Aircreation582SL( fixed_pitch_beta= 28.000 ) Beech Baron 58( fixed_pitch_beta= 0.0 ) Beech King Air 350( fixed_pitch_beta = 0 ) Cessna Skyhawk 172SP( fixed_pitch_beta= 20 ) |
| low_speed_theory_limit | La vitesse ŕ laquelle la théorie des hélices basse vitesse rejoint celle des hélices haute vitesse (pieds/s). |
Aircreation582SL( low_speed_theory_limit= 80.000 ) Beech Baron 58( low_speed_theory_limit= 80.0 ) Beech King Air 350( low_speed_theory_limit = 80 ) Cessna Skyhawk 172SP( low_speed_theory_limit= 80 ) |
| prop_sync_available |
Valeur logique indiquant si une synchronisation des hélices
est disponible (avions bimoteurs) ; 0 = FALSE (non), 1 = TRUE (oui). |
Aircreation582SL( prop_sync_available= 0 ) Beech Baron 58( prop_sync_available= 1 ) Beech King Air 350( prop_sync_available = 1 ) Cessna Grand Caravan( prop_sync_available = 0 ) |
| prop_deice_available |
Valeur logique indiquant si le dégivrage des hélices est
disponible ; 0 = FALSE (non), 1 = TRUE (oui). |
Aircreation582SL( prop_deice_available= 0 ) Beech Baron 58( prop_deice_available= 1 ) Beech King Air 350( prop_deice_available = 1 ) |
| prop_feathering_available |
Valeur logique indiquant si la mise en drapeau des hélices
est disponible (hélices ŕ régime constant seulement) ; 0 = FALSE (non), 1 = TRUE (oui). |
Aircreation582SL( prop_feathering_available= 0 ) Beech Baron 58( prop_feathering_available= 1 ) |
| prop_auto_feathering_available |
Valeur logique indiquant si la mise en drapeau automatique
des hélices est disponible (hélices ŕ régime constant seulement) ; 0 = FALSE (non), 1 = TRUE (oui). |
Aircreation582SL( prop_auto_feathering_available= 0 ) Beech King Air 350( prop_auto_feathering_available= 1 ) |
| min_rpm_for_feather | Régime minimum auquel l'hélice se mettra en drapeau (si la fonction est disponible). |
Beech Baron 58( min_rpm_for_feather= 700.0 ) Beech King Air 350( min_rpm_for_feather = 700 ) Cessna Skyhawk 172SP( min_rpm_for_feather= 0 ) |
| beta_feather | Angle de pale quand l'hélice est en drapeau (degrés). |
Beech Baron 58( beta_feather= 82.5 ) Beech King Air 350( beta_feather = 79.3 ) Cessna Skyhawk 172SP( beta_feather= 0 ) |
| power_absorbed_cf | Coefficient de frottement absorbé par l'hélice. |
Beech Baron 58( power_absorbed_cf= 0.9 ) Beech King Air 350( power_absorbed_cf = 0.9 ) Cessna Skyhawk 172SP( power_absorbed_cf= 0 ) |
| defeathering_accumulators_available |
Valeur logique indiquant si des accumulateurs de retour
de drapeau sont disponibles ; 0 = FALSE, 1 = TRUE. |
Aircreation582SL( defeathering_accumulators_available= 0 ) |
| prop_reverse_available |
Spécifie le facteur sur l'effet inverseur calculé de l'hélice. Une valeur de 0 produit une poussée arričre nulle. Une valeur de 1,0 provoque la poussée théorique normale. Les autres valeurs donneront une valeur calculée en proportion. |
Aircreation582SL( prop_reverse_available= 0 ) Beech King Air 350( prop_reverse_available = 1 ) |
| minimum_on_ground_beta | Angle de pale minimal quand l'avion est au sol (degrés). |
Aircreation582SL( minimum_on_ground_beta= 0.000 ) Beech Baron 58( minimum_on_ground_beta= 0.0 ) Beech King Air 350( minimum_on_ground_beta = 1.0 ) Cessna Skyhawk 172SP( minimum_on_ground_beta= 0 ) |
| minimum_reverse_beta | Angle de pale minimal quand l'hélice est en inverseur de poussée (degrés). |
Aircreation582SL( minimum_reverse_beta= 0.000 ) Beech Baron 58( minimum_reverse_beta= 0.0 ) Beech King Air 350( minimum_reverse_beta = -14.0 ) Cessna Skyhawk 172SP( minimum_reverse_beta= 0 ) |
| thrust_scalar | Paramétre de mise ŕ l'échelle de la poussée calculée fournie par l'hélice. |
Aircreation582SL( thrust_scalar=1.000 ) Beech Baron 58( thrust_scalar = 1.0 ) Beech King Air 350( thrust_scalar = 1.0 ) |
| feathering_switches |
Valeur logique indiquant si un interrupteur de mise en drapeau
des hélices est disponible. Ces interrupteurs (comme sur le Douglas
DC3) permettent au pilote de mettre les hélices en drapeau, quelle
que soit la position du levier de pas d'hélice. 0 = FALSE (non), 1 = TRUE (oui). |
Douglas DC-3( feathering_switches = 1 ) |
| number_of_propellers | Le nombre d'hélices actionnées par moteur. | Voir le Wright Flyer de Flight Simulator 2004 pour un exemple d'avion ŕ un moteur actionnant deux hélices. |
| engine_map | Ensemble d'indicateursqui permettent aux hélices d'ętre actionnées par un moteur différent. | Voir le Wright Flyer de Flight Simulator 2004. |
|
propeller.0 to propeller.1 |
Ce paramčtre permet ŕ une hélice d'ętre placée ŕ une distance spécifiée (longitudinale, latérale et verticale), en pieds, ŕ partir du moteur qui les actionne. | Voir le Wright Flyer de Flight Simulator 2004 |
Cette section définit les caractéristiques du compas magnétique (boussole) de l'avion.
| Propriété | Description | Exemples |
| compass.0 | Mis ŕ 1 pour un compas vertical (sans erreur de plongée). | Aircreation582SL( Compass.0 = 1 ) |
Cette section définit les détails du systčme d'alarme de proximité du sol.
| Propriété | Description | Exemples |
| max_warning_height | La hauteur en dessous de laquelle l'alarme est activée. | Boeing 737-800 Paint1( max_warning_height = 1000 ) |
| sink_rate_fpm | Si un avion dépasse ce taux de descente, une alarme est activée. | Boeing 737-800 Paint1( sink_rate_fpm = -1500 ) |
| excessive_sink_rate_fpm | Si un avion dépasse ce taux de descente, une alarme urgente est activée. | Boeing 737-800 Paint1( excessive_sink_rate_fpm = -2000 ) |
| climbout_sink_rate_fpm | Si un avion commence ŕ descendre pendant le décollage, ou bien dépasse ce taux de descente, une alarme est activée. | Boeing 737-800 Paint1( climbout_sink_rate_fpm = -100 ) |
| flap_and_gear_sink_rate_fpm | Si un avion est en cours d'atterrissage et dépasse ce taux descente sans avoir sorti les volets ni sorti le train, une alarme est activée. | Boeing 737-800 Paint1( flap_and_gear_sink_rate_fpm= -100 ) |
Cette section présente les propriétés les plus utilisées par les caméra des avions. Un avion peut avoir plusieurs sections cameradefinition, qui doivent ętre numérotées de 0 ŕ n. Pour une définition complčte de toutes les propriétés qui peuvent ętre définies pour une caméra reportez-vous au document Camera Configuration. Toutes les propriétés décrites dans ce document peuvent ętre utilisées dans une définition de caméra dans un fichier de configuration de l'avion.
| Propriété | Exemples |
| title |
Boeing 747-400( Title = "Right Side Window" ) Cessna Skyhawk 172SP( Title = "Right Wing" ) DeHavilland Beaver DHC2( Title = "Right Float" ) Extra 300S( Title = "Tail" ) |
| guid |
Boeing 747-400( Guid = {54F54B8A-3EC2-2D4E-8D10-B8F9D0F16ACC}
) Cessna Skyhawk 172SP( Guid = {C690EAFD-223A-42d0-99E0-681ADF93BB59} ) DeHavilland Beaver DHC2( Guid = {B0CA7E72-F3D9-F748-8BF5-108D197B2469} ) Extra 300S( Guid = {D8D67955-2E9B-4e75-9D8B-8EFFBBFAC64A} ) |
| description |
Boeing 747-400( Description = "View of the right wing from the
passenger cabin" ) Cessna Skyhawk 172SP( Description = "View from the right wing tip looking at the cockpit" ) DeHavilland Beaver DHC2( Description = "View from the aft end of the right float looking forward" ) Extra 300S( Description = "Looking forward from the tip of the vertical stabilizer" ) |
| origin |
Boeing 747-400( Origin = Center ) Extra 300S( Origin = Virtual Cockpit ) |
| snappbhadjust |
Boeing 747-400( SnapPbhAdjust = Swivel ) DeHavilland Beaver DHC2( SnapPbhAdjust = None ) |
| snappbhreturn | Boeing 747-400( SnapPbhReturn = FALSE ) |
| panpbhadjust |
Boeing 747-400( PanPbhAdjust = Swivel ) DeHavilland Beaver DHC2( PanPbhAdjust = None ) |
| panpbhreturn | Boeing 747-400( PanPbhReturn = FALSE ) |
| track | Boeing 747-400( Track = None ) |
| showaxis |
Boeing 747-400( ShowAxis = FALSE ) Extra 300S( ShowAxis = TRUE ) |
| allowzoom |
Boeing 747-400( AllowZoom = TRUE ) Extra 300S( AllowZoom = FALSE ) |
| initialzoom |
Boeing 747-400( InitialZoom = 1.0 ) Cessna Skyhawk 172SP( InitialZoom = 0.75 ) DeHavilland Beaver DHC2( InitialZoom = .5 ) Extra 300S( InitialZoom = 0.4 ) |
| showweather | Boeing 747-400( ShowWeather = Yes ) |
| initialxyz |
Boeing 747-400( InitialXyz = 5.5, 0.75, -13 ) Cessna Skyhawk 172SP( InitialXyz = 7.5, 0.75, 0 ) DeHavilland Beaver DHC2( InitialXyz = 1.5, .5, -3.9 ) Extra 300S( InitialXyz = 0, 2.0, -3.9 ) |
| initialpbh |
Boeing 747-400( InitialPbh = 0, 0, 95 ) Cessna Skyhawk 172SP( InitialPbh = 5, 0, 270 ) DeHavilland Beaver DHC2( InitialPbh = 0, 0, 0 ) Extra 300S( InitialPbh = 10, 0, 0 ) |
| xyzadjust | Boeing 747-400( XyzAdjust = TRUE ) |
| category |
Boeing 747-400( Category=Aircraft ) Extra 300S( Category = VC ) |
| momentumeffect |
Boeing 747-400( MomentumEffect=TRUE ) Extra 300S( MomentumEffect = TRUE ) |
| clipmode | Boeing 747-400( ClipMode=Minimum ) |
| zoompanscalar | Extra 300S( ZoomPanScalar = 1.0 ) |
| showlensflare | Extra 300S( ShowLensFlare=FALSE ) |
La quantité d'énergie produite par un moteur et la puissance requise pour la rotation d'une hélice dans l'air détermine l'augmentation et la diminution du régime de rotation. Un turbopropulseur est en fait la combinaison d'un moteur ŕ turbine et d'une hélice. Les valeurs dans cette section sont inclus pour modifier les valeurs spécifiques ŕ un turbopropulseur.
| Propriété | Description | Exemples |
| power_scalar |
Changer cette valeur affecte la quantité d'énergie délivrée par le moteur ŕ l'arbre d'hélice. |
Beech King Air 350( power_scalar = 1.0 ) Bell 206B JetRanger( power_scalar = 1.0 ) |
| maximum_torque | Couple moteur maximal disponible sur l'axe (pied.livre). |
Beech King Air 350( maximum_torque = 3270 ) Cessna Grand Caravan( maximum_torque = 1865 ) de Havilland Dash 8-100( maximum_torque = 7878 ) |
| powerspecificfuelconsumption | Consommation spécifique de carburant au banc (turboprop. seulement). | Beech King Air 350 Paint1( PowerSpecificFuelConsumption = 0.55 ) |
Cette section est utilisée pour définir les caractéristiques des indicateurs de vitesse sur les tableaux de bord. La liste des indicateurs doit ętre numérotée dans l'ordre : 0,1,2, ... n. Ces caractéristiques définissent l'étalonnage entre la vitesse calibrée et la vitesse indiquée.
| Propriété | Description | Exemples |
|
airspeed_indicator.0 to airspeed_indicator.n |
Le premier paramčtre est un facteur sur la vitesse corrigée, et le second est un décalage en noeuds. Le décalage est appliqué en premier, puis le facteur. Le facteur par défaut est 1,0 et le décalage par défaut est 0,0 ; donc par défaut, la vitesse indiquée est égale ŕ la vitesse calibrée. |
Cessna Grand Caravan( airspeed_indicator.0 = 1.183, -24.75
) DeHavilland Beaver DHC2( airspeed_indicator.0 = 1, 0 ) Maule M7 260C( airspeed_indicator.0 = 1.3, -24.0 ) |
Cette section définit les caractéristiques de la presssurisation de l'avion.
| Propriété | Description | Exemples |
| design_cabin_pressure | Cessna Grand Caravan( design_cabin_pressure = 0 ) | |
| max_pressure_differential | Cessna Grand Caravan( max_pressure_differential = 0 ) |
Cette section définit les caractéristiques des variometers de l'avion.
| Propriété | Description | Exemples |
| variometer.0 | DG808S( variometer.0=1 ) |
Cette section définit les caractéristiques des chaînes de lacet de l'avion.
| Propriété | Description | Exemples |
| yaw_string_available | DG808S( yaw_string_available=1 ) |
Cette section définit le systčme de balast ŕ eau de l'avion.
| Propriété | Description | Exemples |
| tank.0 | Fuselage avant. | DG808S( Tank.0 = 7.79, -2.75, 0.0, 0.0, 1 ) |
| tank.1 | Fuselage arričre. | DG808S( Tank.1 = 3.57, -3.28, 0.0, 0.0, 2 ) |
| tank.2 | Extérieur gauche. | DG808S( Tank.2 = 9.25, -0.60, -10.5, 0.0, 2 ) |
| tank.3 | Intérieur gauche | DG808S( Tank.3 = 16.38, -0.66, -4.5, 0.0, 1 ) |
| tank.4 | Intérieur droit. | DG808S( Tank.4 = 16.38, -0.66, 4.5, 0.0, 1 ) |
| tank.5 | Extérieur droit. | DG808S( Tank.5 = 9.25, -0.60, 10.5, 0.0, 2 ) |
| numberofreleasevalves | Nombre de vannes d'évacuation. | DG808S( NumberOfReleaseValves = 2 ) |
| dumprate | Gallons par seconde. | DG808S( DumpRate = 0.18494 ) |
Cette section décrit comment configurer un systčme de fumée pour l'avion. Vous pouvez définir plusieurs sources de fumée sur un avion.
| Propriété | Description | Exemples |
|
smoke.0 to smoke.n |
La postion longitudinale, latérale et verticale de l'émetteur de fumée, en pieds, et le nom du fichier d'effet de fumée. | Extra 300S( smoke.0=-10.00, -0.70, 0.0, fx_smoke_w ) |
Cette section décrit les caractéristiques de pliage des ailes de l'avion. Notez que ce sont des ailes repliables utilisées pour stocker un avion de maničre plus compacte lorsqu'il est au sol, ou sur le pont, et non pas des ailes ŕ flčche variable utilisées sur certains avions supersoniques. Les ailes ŕ flčche variable ne sont pas pris en charge dans Flight Simulator X.
| Propriété | Description | Exemples |
| wing_fold_system_type |
Un parmi : 0: aucun (par défaut) 1: manuel 2: pneumatique 3: Electrique 4: Hydraulique |
From Microsoft ® Combat Flight Simulator: F4F-4 Wildcat (wing_fold_system_type = 4 ) |
| fold_rates | Deux valeurs : le pourcentage par seconde pour sortir et rétracter en entier. | F4F-4 Wildcat (fold_rates = 0.12,0.11) |
Cette section déscrit les positions des anémomčtres dans l'avion.
| Propriété | Description | Exemples |
|
anemometer.0 to anemometer.n |
La position longitudinale, latérale et verticale de l'anémomčtre depuis le point de référence. |
(From Flight Simulator 2004) Ryan NYP( anemometer.0 = -10.0, 0.0, 2.7 ) Vickers Vimy Transatlantic( anemometer.0 = 9.6, 0.0, -2.2 ) |
Cette section déscrit quelques contraintes de réalisme, associées en particulier aux premiers avions disponibles dans Flight Simulator 2004. Les valeurs proposées sont utilisées pour rendre un avion plus stable.
| Propriété | Description | Exemples |
| rollmomentfrombeta | Facteur et décalage appliqués au moment de roulis depuis béta. |
(From Flight Simulator 2004) Wright Flyer(RollMomentFromBeta = -0.5, 0 ) |
| rollmomentfromailerons | Facteur et décalage appliqués au moment de roulis depuis les ailerons. | Wright Flyer( RollMomentFromAilerons = 1.5, 0 ) |
| pitchmomentzeroalpha | Facteur et décalage appliqués ŕ l'angle zéro de l'attache. | Wright Flyer( PitchMomentZeroAlpha = 1.0, 0.002 ) |
Les sections suivantes sont spécifiques aux hélicoptčres seulement. Flight
Simulator prend en charge deux types d'hélicoptčres différents.
Les
premiers sont des hélicoptčres qui sont basés sur le Bell Model 206. Les fichiers
.air pertinents sont examinés pour faire le choix.
Le deuxičme type
est basé sur le nouveau Robinson R22. L'aérodynamique du R22 est basée sur les
données trouvées dans le fichier aircraft.cfg.
La section
[hélicoptčre] est la seule section spécifique aux hélicoptčres
qui est utilisée par la méthode de Bell 206. Le R22 utilise toutes les autres
sections spécifiques aux hélicoptčres.
Le paramčtre low_realism_stability_scale rčgle la stabilité de l'hélicoptčre Bell 206B avec un réalisme faible pour que l'appareil soit plus facile ŕ piloter. Le facteur de stabilité est décomposé en trois composantes : amortissement du tangage, du roulis et du lacet. Voici comment la simulation utilise ce paramčtre :
1. Le facteur de stabilité est dimensionné en fonction des valeurs définies pour le tangage, le roulis, le lacet. Par exemple, l'augmentation de la premičre valeur (incidence) ŕ 1,1 augmente le facteur d'amortissement de l'incidence de 10 pour cent.
2. Le facteur de stabilité est dimensionné par le curseur General Flight Model Realism (modčle général de réalisme de vol) dans la boîte de dialogue Paramčtres de réalisme. Avec le réglage le plus élevé de réalisme, le facteur est ramené ŕ 0% (pas d'amortissement supplémentaire) ; réglé au minimum, il est mis ŕ 100 %. Les changements du facteur de stabilité dans le .cfg ont leur plus grand effet lorsque le paramčtre est réglé sur le réalisme minimum, et n'ont aucun effet lorsque le réalisme est réglé au maximum. L'augmentation excessive de ces valeurs se traduira par un amortissement exagéré, ce qui rend difficile le contrôle de l'hélicoptčre.
| Propriété | Description | Exemples |
| low_realism_stability_scale | Facteurs de stabilité pour l'incidence, l'inclinaison latérale, le lacet avec les réglages ŕ réalisme faible. | Bell 206B JetRanger( low_realism_stability_scale = 1.0, 1.0, 1.0 ) |
| reference_length | Longueur de l'hélicoptčre, en pieds. | Robinson R22( reference_length = 21.58 ) |
| reference_frontal_area |
Le maître-couple (aire du fuselage vu de face) en pieds˛. |
Robinson R22( reference_frontal_area = 17.7 ) |
| reference_side_area | L'aire latérale totale, en pieds˛, de l'hélicoptčre vu de côté. | Robinson R22( reference_side_area = 44.5 ) |
| side_aero_center |
La position longitudinale, en pieds, depuis le point de référence, du centre aérodynamique latéral. |
Robinson R22( side_aero_center = -12.5 ) |
| right_trim_scalar |
Facteur sur l'effet du compensateur qui s'oppose ŕ la disymétrie de la portance. Le compensateur induit normalement un moment de roulis vers la droite, mais une valeur négative crée un moment vers la gauche. |
Robinson R22( right_trim_scalar = 1.0 ) |
| correlator_available | Cet indic. determine si un corrélateur de pas collectif est configuré sur cet hélicoptčre. | Robinson R22( correlator_available = 1 ) |
| governed_pct_rpm_ref | Définit le régime en % que le régulateur tente de maintenir. 1,0 = 100% du régime nominal, bien que quelques % au dessus soit normal. | Robinson R22( governed_pct_rpm_ref = 1.04 ) |
| governor_pid |
Contrôleur asservi Proportional – Integral – Derivative (PID) qui
travaille pour maintenir le régime de référence. La série de valeurs
est :
|
Robinson R22( governor_pid = 0.4, 0, 0.1, 0, 0.2 ) |
| rotor_brake_scalar | Facteur pour l'effet du frein de rotor. | Robinson R22( rotor_brake_scalar = 1.0 ) |
| torque_scalar | Facteur pour l'effet que le rotor a sur le moment de lacet de l'hélicoptčre. | Robinson R22( torque_scalar = 1.0 ) |
| cyclic_roll_control_scalar | Facteur sur la capacité de contrôle du roulis ŕ partir du mouvement latéral du pas cyclique. | Robinson R22( cyclic_roll_control_scalar =1.0 ) |
| cyclic_pitch_control_scalar | Facteur sur la capacité de contrôle de l'incidence ŕ partir du mouvement avant/arričre du pas cyclique. | Robinson R22( cyclic_pitch_control_scalar =1.0 ) |
| pedal_control_scalar | Facteur sur la capacité de contrôle du lacet ŕ partir du mouvement des pédales anti-couple | Robinson R22( pedal_control_scalar =1.0 ) |
| collective_on_rotor_torque_scalar |
Facteur du couple exercé sur le systčme de rotor en raison du pas collectif des pales du rotor. L'augmentation de cette constante se traduit par un ralentissement du régime du rotor d'autant plus fort que le pas collectif est augmenté. |
Robinson R22( collective_on_rotor_torque_scalar = 1.0 ) |
Cette section définit les caractéristiques aérodynamiques des hélicoptčres du type R22.
| Propriété | Description | Exemples |
| drag_force_cf | Coefficient de traînée longitudinale. | Robinson R22( drag_force_cf = 0.55 ) |
| side_drag_force_cf | Coefficient de traînée latérale. | Robinson R22( side_drag_force_cf = 10.0 ) |
| pitch_damp_cf | Coefficient d'amortissement de l'incidence (résistance ŕ la vitesse d'incidence). | Robinson R22( pitch_damp_cf = -2.0 ) |
| roll_damp_cf | Coefficient d'amortissement du roulis (résistance ŕ la vitesse de roulis). | Robinson R22( roll_damp_cf = -2.0 ) |
| yaw_damp_cf | Coefficient d'amortissement de lacet (résistance ŕ la vitesse de lacet) | Robinson R22( yaw_damp_cf = -0.1 ) |
| yaw_stability_cf | Coefficient de stabilité de lacet. C'est l'effet girouette (weathervane). | Robinson R22( yaw_stability_cf = 0.27 ) |
Cette section définit les caractéristiques du rotor principal des hélicoptčres du type R22.
| Propriété | Description | Exemples |
| position | La distance longitudinale, latérale, et verticale, en pieds, entre le centre du rotor principal et le point de référence. | Robinson R22( Position = -8.5, 0, 4.91 ) |
| radius | Le rayon du rotor, en pieds. | Robinson R22( Radius = 12.583 ) |
| max_disc_angle | L'angle de déflexion maximal absolu, vers le haut ou vers le bas, dont le disque du rotor peut se mouvoir avec le pas cyclique. En degrés. | Robinson R22( max_disc_angle = 5.0 ) |
| ratedrpm | Le régime nominal du rotor principal. | Robinson R22( RatedRpm = 510 ) |
| number_of_blades | Le nombre de pales du rotor principal. | Robinson R22( Number_of_blades = 2 ) |
| weight_per_blade | Le poids approximatif de chaque pale du rotor, en livres. | Robinson R22( Weight_per_blade = 26.0 ) |
| weight_to_moi_factor |
Les constantes utilisées dans le calcul du moment d'inertie du disque rotor. L'algorithme de calcul du moment d'inertie tient compte du nombre de lames, de leur poids, et de cette constante. Augmenter cette constante augmente l'inertie du disque. |
Robinson R22( Weight_to_moi_factor = 0.58 ) |
| inflow_vel_reference | La vitesse de référence de la masse d'air traversant le rotor. Augmenter cette valeur augmente la poussée générée. | Robinson R22( inflow_vel_reference = 34.0 ) |
Cette section définitles caractéristiques du rotor secondaire des hélicoptčres du type R22.
| Propriété | Description | Exemples |
| position | La distance longitudinale, latérale, et verticale, en pieds, entre le centre du rotor principal (erreur ? n'est-ce pas plutôt le rotor secondaire ?) et le point de référence. | Robinson R22( Position = -22.8, -0.74, 1.8 ) |
| tailrotor | Cet indic, mis ŕ 1, indique que le rotor secondaire est un rotor de queue, ou anti-couple. | Robinson R22( TailRotor = 1 ) |
| radius | Le rayon du rotor, en pieds. | Robinson R22( Radius = 1.75 ) |
(The Kneeboard, Model, Sound, Texture and Panel Files)
Dans Flight Simulator, la totalité du contenu de la tablette (kneeboard) est présenté via des fichiers HTML (.htm). La tablette inclue six pages :
Affiche la conférence pour le vol (briefing), s'il en existe une. Le texte affiché sur la page d'information de la tablette est spécifique au vol, et est situé dans le sous-répertoire correspondant du répertoire Flights (Vols). Pour en savoir plus sur la création des conférences d'information pour les vols que vous créez, consultez la rubrique "Tout sur les vols" (All About Flights) article contenu dans le centre d'apprentissage (Learning Center).
Enregistre les 10 derničres transmissions radio de l'Air Traffic Control vers votre avion. Le texte affiché sur la page Radio de la tablette est automatiquement généré quand vous utilisez l'ATC. Le texte ne peut pas ętre modifié.
Fournit une liste de points de passage, des caps et autres informations pour un plan de vol créé en utilisant le planificateur de vol. Le texte affiché sur la page de Navigation Log de la tablette est généré automatiquement ŕ partir d'un plan de vol actif. Le texte ne peut pas ętre modifié.
Fournit une liste complčte des commandes au clavier. Le texte affiché sur l'onglet Raccourcis clavier de la tablette est situé dans le dossier principal des avions et est nommé kneeboard_keys.htm.
Listes des procédures étape par étape pour l'avion que vous prenez, pour que (lorsqu'elle est utilisé conjointement avec les vitesses sur la page de référence) le vol avec FS X soit une expérience plus réaliste. Le texte affiché sur la page des listes de contrôle est propre ŕ un avion, et sauvegardé dans un fichier .htm. dans le conteneur pour aéronef (dossier des appareils) associés ŕ chaque avion. Le fichier de la page Listes de contrôle est nommé aircraftname_check.htm oů aircraftname est le nom de l'avion (par exemple, extra300s_check.htm).
Liste des vitesses recommandées pour l'avion que vous prenez : la vitesse de vol au cours de chaque phase de vol, et ses limites. Le texte affiché sur la page de référence est spécifique ŕ l'aéronef, et sauvegardée dans un fichier .htm dans le conteneur pour aéronef (dossier des appareils) associé ŕ chaque avion. Le fichier de la page de référence est nommé aircraftndame_ref.htm oů aircraftname est le nom de l'avion (par exemple, extra300s_ref.htm).
Pour que la la liste de contrôle et la page de référence s'affichent, deux lignes doivent ętre présentes dans le fichier aircraft.cfg, en haut de la section [fltsim.0] :
oů aircraftname est le nom de l'avion (par exemple, extra300s_check et extra_300s_ref). Notez qu'aucune extension htm n'est nécessaire ici.
Vous pouvez créer ou ouvrir kneeboard.htm avec le bloc-notes ou tout autre programme d'édition de texte qui peut lire et enregistrer des fichiers au format texte, et le modifier en suivant les conventions HTML 4.0.
Une fois que vous avez apporté vos modifications ŕ un fichier kneeboard.htm, assurez-vous de recharger la page sur la tablette : sélectionnez une autre page sur la tablette, puis retournez ŕ la page que vous avez modifiée.
Le fichier panel.cfg est situé dans le dossier Panel d'un avion, et définit les caractéristiques du poste de pilotage de l'avion, y compris les paramčtres de la fenętre, les paramčtres de vues, et les instruments (gauges). Pour une explication complčte de la structure d'un fichier panel.cfg et des instructions pour l'éditer, voir Panel Configuration Files (traduction fraçaise).
Le fichier model.cfg est situé dans le dossier Model d'un avion, et précise quels sont les modčles visuels (fichiers .mdl), extérieur et intérieur, ŕ présenter pendant le vol normal et éventuellement aprčs un crash. Notez que ceci est un changement par rapport ŕ Flight Simulator 2004, avec le modčle de l'intérieur séparé du modčle extérieur. Si un modčle hérité existe avec les deux, intérieur et extérieur, dans le męme fichier .mdl, les modčles seront affichés correctement avec un seul paramčtre normal. Cependant cette méthode de stockage des modčles est inefficace, parce que le modčle intérieur n'est jamais nécessaire sur tous les avions qui ne sont pas contrôlés par l'utilisateur. Lors de la conception de nouveaux modčles, il est fortement recommandé que le fichier de modčle soit séparé en deux parties.
| Propriété | Description | Exemples |
| normal | Modčle extérieur 3D utilisé normalement. |
Aircreation_582SL( normal=AirCreation_582SL ) B737_800( normal=B737_800 ) b747_400( normal=B747_400 ) beech_baron_58( normal=Beech_Baron_58 ) Beech_King_Air_350( normal=Beech_King_Air_350 ) Bombardier_CRJ_700( normal=Bombardier_CRJ_700 ) C172( normal=Cessna172SP ) C208B( normal=C208B ) |
| interior | Modčle du cockpit interne, virtuel. |
Aircreation_582SL( interior=AirCreation_582SL_Interior ) B737_800( interior=B737_800_interior ) b747_400( interior=B747_400_interior ) beech_baron_58( interior=Beech_Baron_58_interior ) Beech_King_Air_350( interior=beech_king_air_350_interior ) Bombardier_CRJ_700( interior=Bombardier_CRJ_700_Interior ) C172( interior=cessna172sp_interior ) C208B( interior=c208b_interior ) |
| crash | Modčle 3D utilisé si l'avion s'écrase. | No Exemples of crash models are shipped with Flight Simulator. |
The sound.cfg file is located in an aircraft’s Sound folder, and defines the sounds to use for that aircraft (such as the sound of the engine at various speeds, the sound of the landing gear going down, and so on). Refer to the Sound Configuration files document for more details.
Le fichier sound.cfg est situé dans le dossier Sound de sons d'un avion, et définit les sons ŕ utiliser pour que cet avion (tels que le bruit du moteur ŕ des vitesses différentes, le son du train d'atterrissage sortant, et ainsi de suite). Consultez le document Sound Configuration files pour plus de détails.
Les textures d'un aéronef sont définies par les fichiers .bmp dans le dossier Texture de l'avion, et sont projetées sur les pičces de l'avion, comme spécifié dans le modčle visuel de l'avion (fichier .mdl), situé dans le dossier du modčle. Les noms de fichiers de texture doivent correspondre aux fichiers de texture qui sont référencés dans le fichier .md. Si les noms de fichiers ne correspondent pas, les textures ne seront pas rendues.
Les fichiers de texture de FS X sont mipmapped. Une texture mipmap
se compose d'une séquence d'images, dans des résolution de plus en plus faibles,
qui sont une représentation préfiltrée de la męme image. Le mipmapping
est un moyen de calcul ŕ faible coűt permettant l'amélioration de la qualité
des textures rendues. Chaque image préfiltrée, ou niveau, dans le mipmap
est inférieure d'une puissance de deux ŕ son niveau précédent. Un niveau ŕ haute
résolution est utilisée pour les objets qui sont proches de l'observateur. Des
niveaux plus bas de résolution sont utilisés pour les objets qui se déplacent
plus loin.
Pour modifier une texture mipmap, vous devez utiliser Image Tool, une application de retouche d'image incluse dans le SDK de Flight Simulator. N'oubliez pas d'enregistrer une copie de l'original du fichier avant de tenter de le modifier.
Une texture peut également ętre modifiée ŕ l'aide d'une simple application graphique tel que Microsoft Paint, mais elle sera enregistrée en tant que .bmp standard au lieu d'un .bmp mipmap. Flight Simulator génčre automatiquement les mipmaps pour la texture, bien que ces mipmaps puissent ne pas ętre d'une qualité aussi élevée que les mipmaps créés ŕ l'aide d'Image Tool.
NDT : alias signifie "nom d'emprunt". Le terme aliasing signifie donc "utilisation d'un nom d'emprunt". Et le verbe to alias signifie "utiliser d'un nom d'emprunt". Pour la simplicité, le mot anglais aliasing a été conservé tel quel dans la traduction française, mais le verbe to alias a été traduit par "appeler", dans le sens "je m'appelle Jean-Paul."
L'aliasing permet ŕ plusieurs avions d'utiliser les męmes fichiers (panels, flight models, sounds etc.). Cela permet d'économiser de l'espace disque et une organisation plus efficace des fichiers. Vous pouvez appeler les fichiers panel.cfg, model.cfg, et sound.cfg d'un aéronef ŕ partir de fichiers provenant d'autres aéronefs. De męme que des ensembles de configuration permettent ŕ un avion au sein d'un conteneur de partager des composants, l'aliasing permet permet ŕ un avion dans un conteneur différent de partager des composants.
Pour appeler un fichier panel.cfg, model.cfg, ou sound.cfg d'un avion ŕ partir d'un autre avion, il suffit de changer le fichier d'aliasing .cfg ŕ lire :
[fltsim]
alias= aircraftname\panel
or
[fltsim]
alias= aircraftname\model
or
[fltsim]
alias= aircraftname\sound
Les fichiers appelés sont recherchés dans l'ordre suivant :
Supposons que vous ayez importé un Boeing 757 aircraft depuis le Web dans Flight Simulator X , mais que vous vouliez utiliser le panel du 737-400 quand vous volez. Au lieu de dupliquer tous les fichiers panel du 737-400 (panel.cfg et .bmps) et de les mettre dans un nouveau conteneur du 757, vous pouvez les appeler dans leur emplacement existant depuis le fichier panel.cfg du 757. Il suffit de changer le panel.cfg du 757 ŕ lire :
[fltsim]
alias=\B737_400\panel
Le 757 utilisera alors le panel.cfg du 737-400 (ainsi que les .bmps associés). La syntaxe pour l'aliasing de model.cfg et sound.cfg est identique.
© 2006 Microsoft Corporation. All rights reserved.
Traduction Jean-Paul Corbier- juin 2011
~~@~~